

Open-type field six-degree-of-freedom series-parallel processing robot
A field-type, degree-of-freedom technology, used in metal processing mechanical parts, metal processing, metal processing equipment, etc., can solve the problems of low processing measurement accuracy, complex structure, high cost, and overcome the problems of small processing range, high rigidity, and high structure. simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
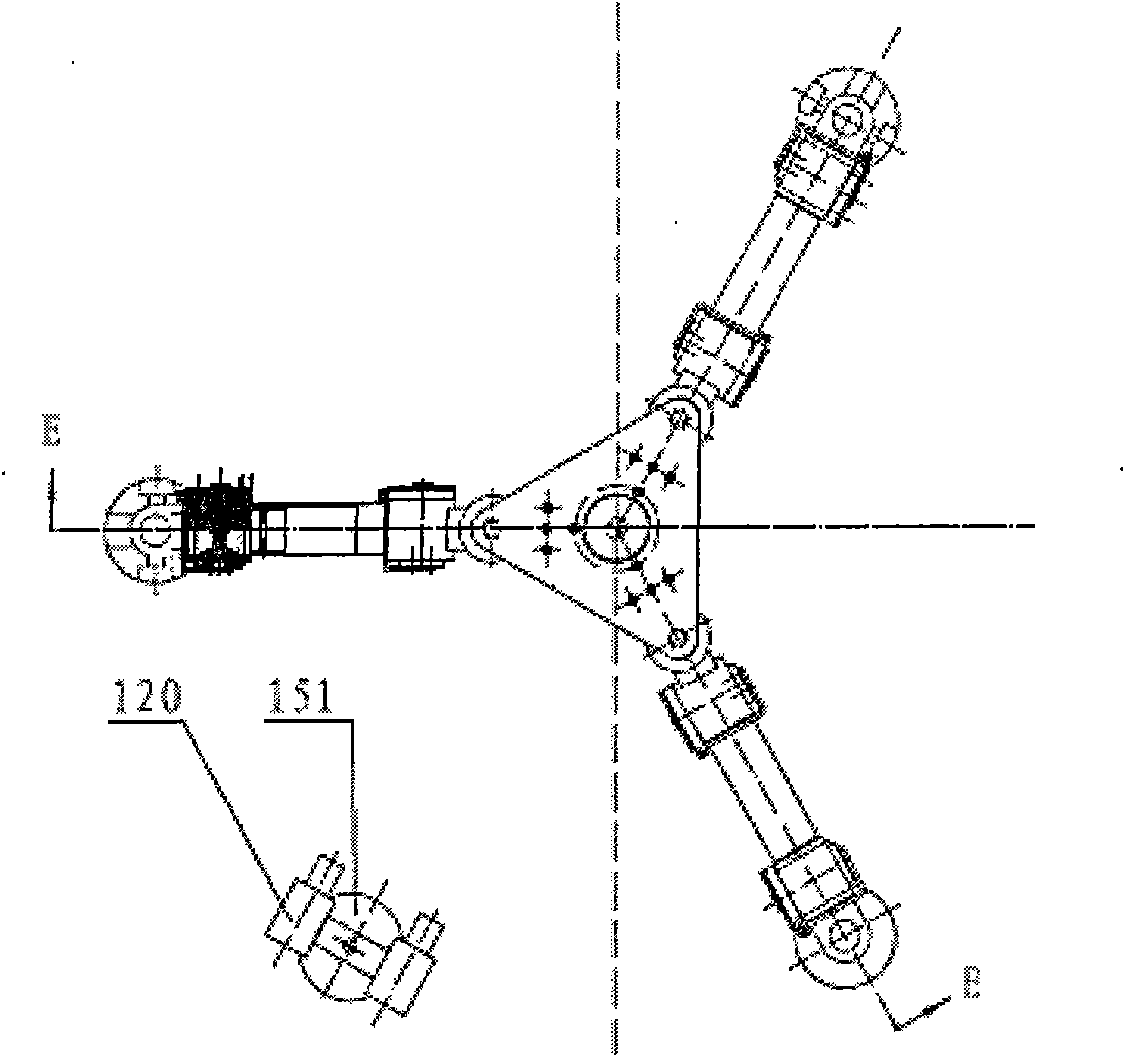
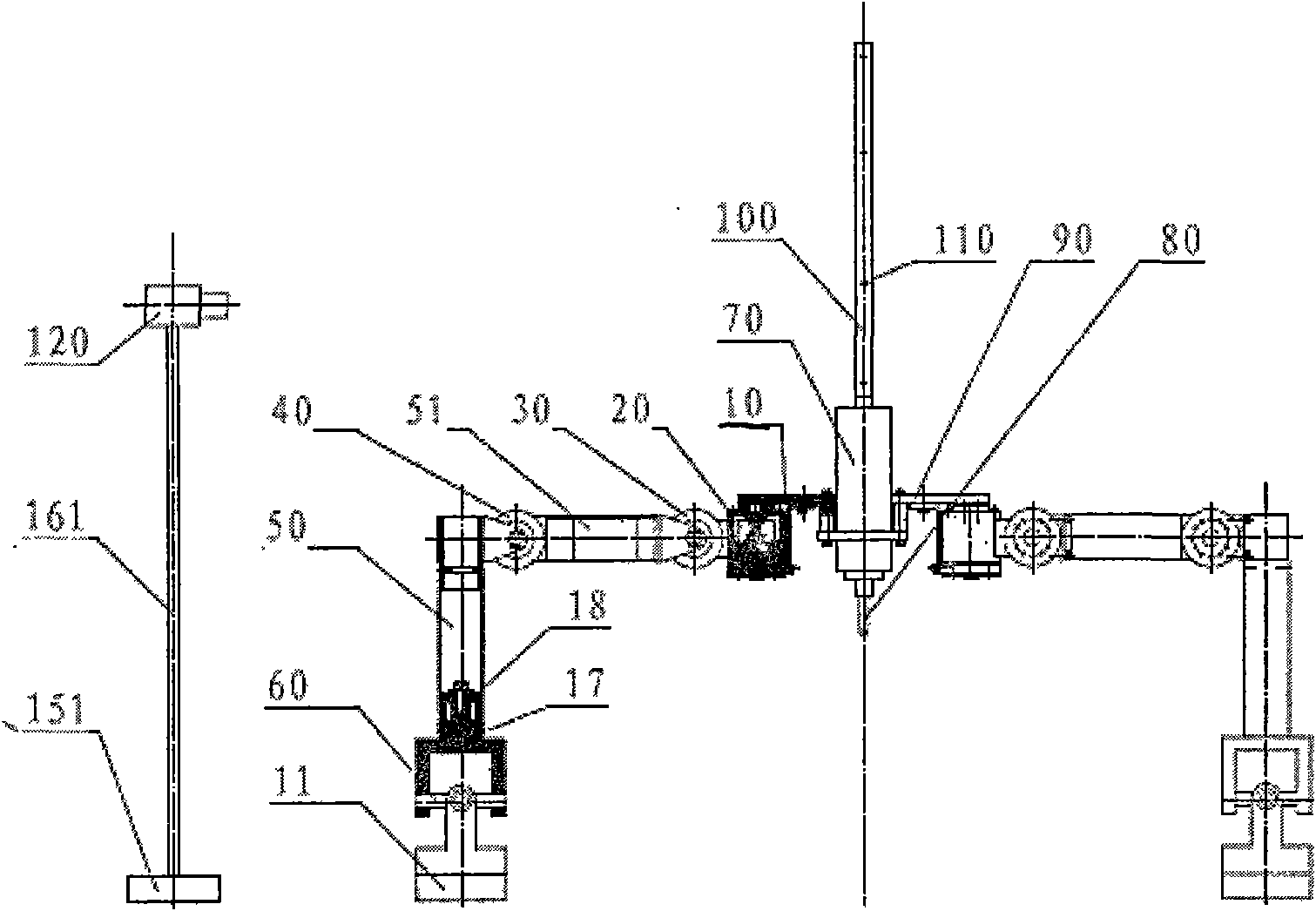
[0044] refer to figure 1 and figure 2 , an open field type six-degree-of-freedom series-parallel processing robot, comprising a platform (10), legs, a processing spindle (70) and a processing tool (80), the legs have at least three, and the legs surround The center of the platform (10) is installed symmetrically on the corners of the platform (10), and each leg is composed of a swing joint (20), a leg joint (30), a flexion and extension joint (40), a foot ball joint (60) and foot (11), the processing spindle (70) is installed in the middle of the platform (10), the processing tool (80) is installed on the processing spindle (70), and the processing robot also includes a visual benchmark (100), Vision camera (120), force sensor (90) and intelligent controller, described visual benchmark (100) is installed on the described processing spindle (70), and described visual benchmark (100) is positioned at described visual camera (120) In the visual range, there are three force sen...
Embodiment 2
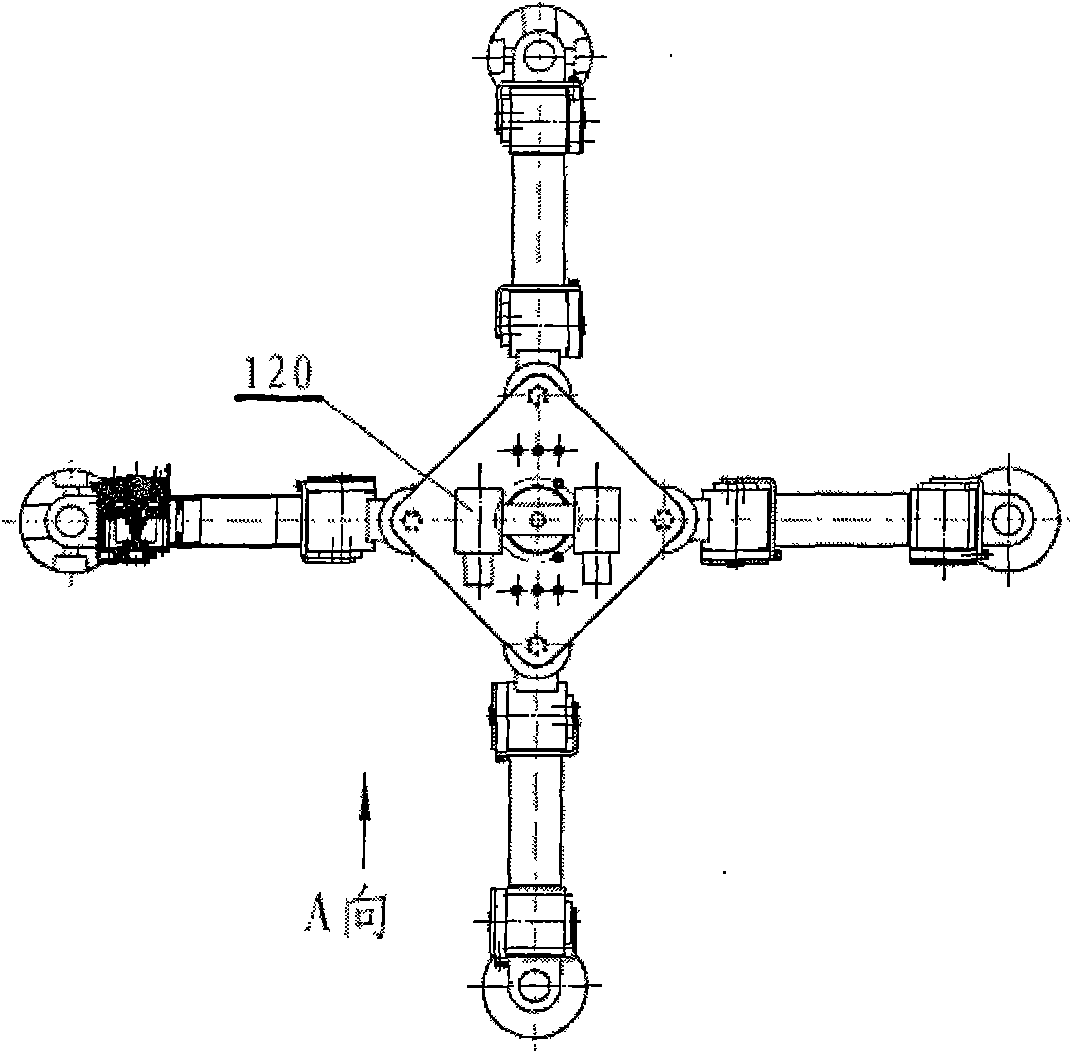
[0054] refer to image 3 and Figure 4 , the robot of the present embodiment has four supporting legs, is installed on the four angles of platform (12) symmetrically around the center of quadrangular platform (12). Its leg structure and installation method are the same as figure 1 The embodiments are exactly the same, and the installation methods of the machining spindle (70), the machining tool (80), the force sensor (90) and the quadrangular platform (12) are also exactly the same. In this embodiment, the robot has four legs and has the function of walking, so the leg-lifting joints (30) of its legs have driving ability. In this embodiment, the visual camera (120) is fixed on the processing spindle (70) through the visual camera support rod (121), and the visual benchmark (100) is then installed and fixed on the visual benchmark next to the robot (i.e. on the field of the processing site). On the support (162).
[0055] The working principle of this embodiment is: the vi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More