

Autonomous celestial navigation method for deep space explorer on swing-by trajectory
A technology of deep space detectors and leveraged flight, applied in astronomical navigation, integrated navigators, etc., can solve the problems that the filter cannot track, the filtering method cannot track the change of measurement noise in real time, and the navigation accuracy cannot be guaranteed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
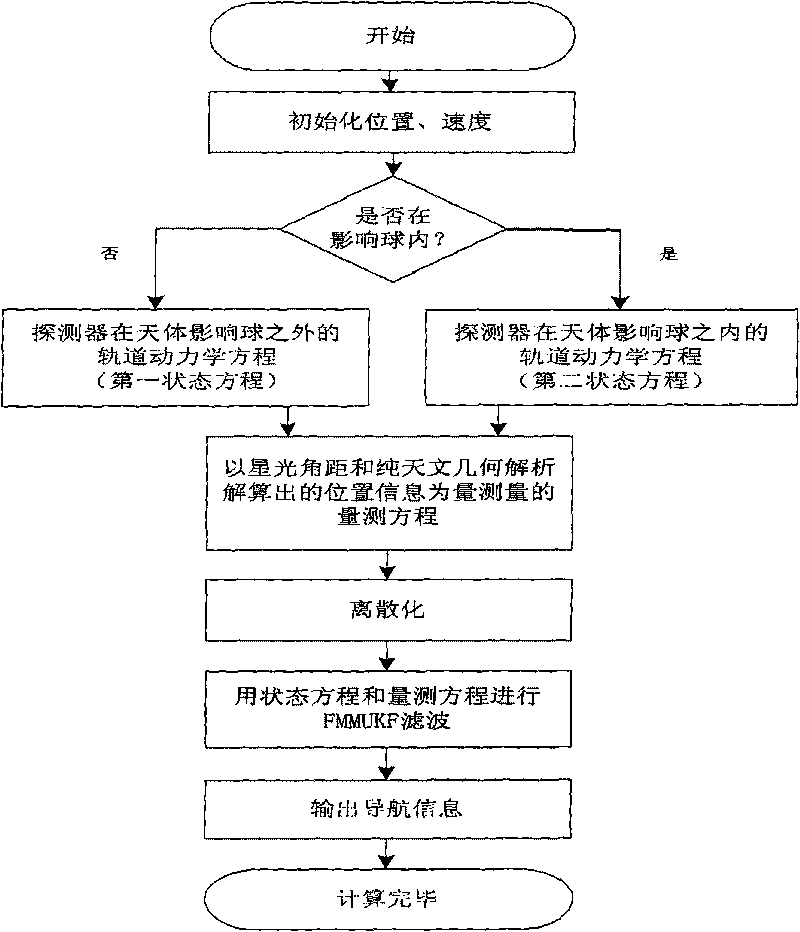
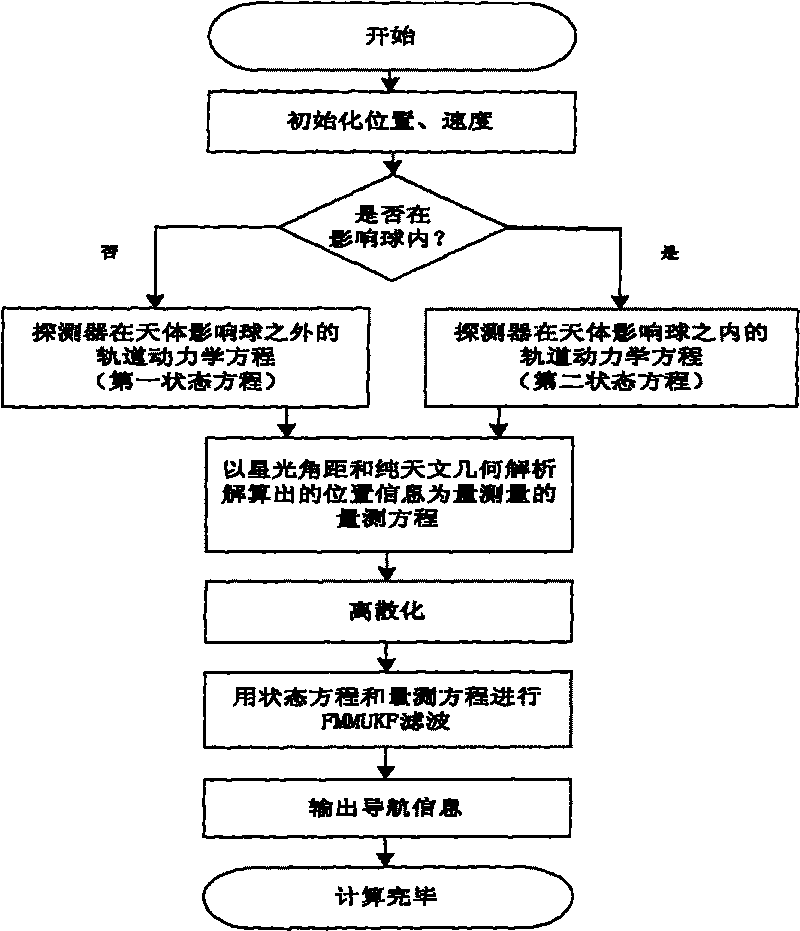
[0071] Such as figure 1 Shown, the concrete implementation method of the present invention is as follows:
[0072] 1. Initialize the position and velocity information of the probe first, determine whether the deep space probe is within the influence sphere of the celestial body by judging the distance between the deep space probe and the planet, and establish two state equations for the navigation system of the deep space probe on the leveraged flight orbit.
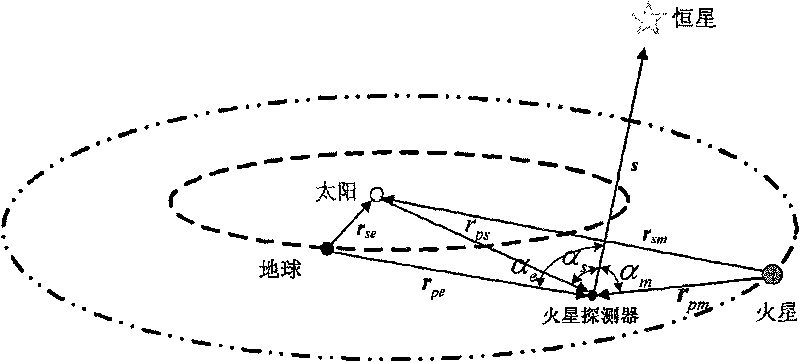
[0073] Taking the probe that borrows force from Mars as an example, similar methods can be used for analysis when the probe borrows force from other celestial bodies. When a deep-space probe flies on Mars, its orbital motion can be approximately divided into two stages: ①When the probe is outside the influence sphere of Mars, it is a multi-body motion model with the sun as the main gravitational body; When the object is within the influence sphere of Mars, it is the captured two-body motion model with Mars as the main ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More