Navigation control method of underground automatic scraper
A control method and technology of a scraper, applied in the field of navigation control, can solve the problems of heavy burden on the measurement system and data transmission system, inability to perform trajectory estimation, etc., so as to overcome the difficulties of environmental measurement data and processing data, and reliably track the target path. , the effect of reducing dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The navigation control method of the underground autonomous scraper of the present invention, its preferred specific implementation is as follows figure 1 shown, including steps:
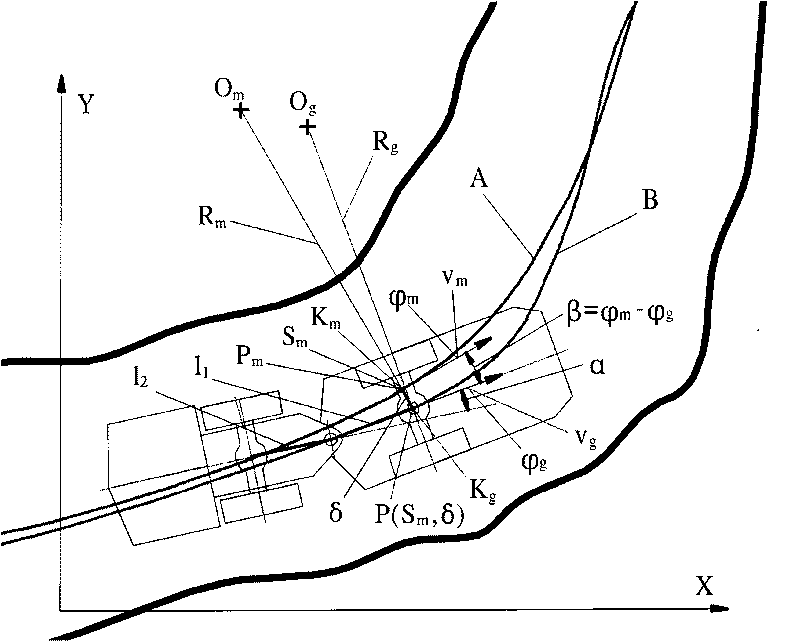
[0030] A. Taking the pre-planned trajectory of the scraper as the target path of the scraper, taking the actual trajectory of the location reference point P of the scraper as the tracking trajectory of the scraper, and the arc length of the curve along the target path the s m (k) Storage path curvature K m (k) series of values and starting point heading angle Wherein, k is the number of sampling times, k=1, 2, 3, ..., using the sampling period T as the measurement and control interval;
[0031] Taking the heading angle on the target path Heading angle with the tracked trajectory The difference is defined as the heading angle deviation Use the positioning reference point P of the scraper and the point P projected on the target path by this point m The distance is defined as the la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com