

Operational robot for minimally invasive celiac surgery
A robot, abdominal cavity technology, applied in the field of robotics, can solve the problems of the increase of the opening of the minimally invasive surgery, the limitation of the size of the operation part, and the unfavorable rehabilitation of the patient, so as to achieve the effect of reducing the operation time and the wound.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention are described in detail below, and the present embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are provided, but the protection scope of the present invention is not limited to the following embodiments.
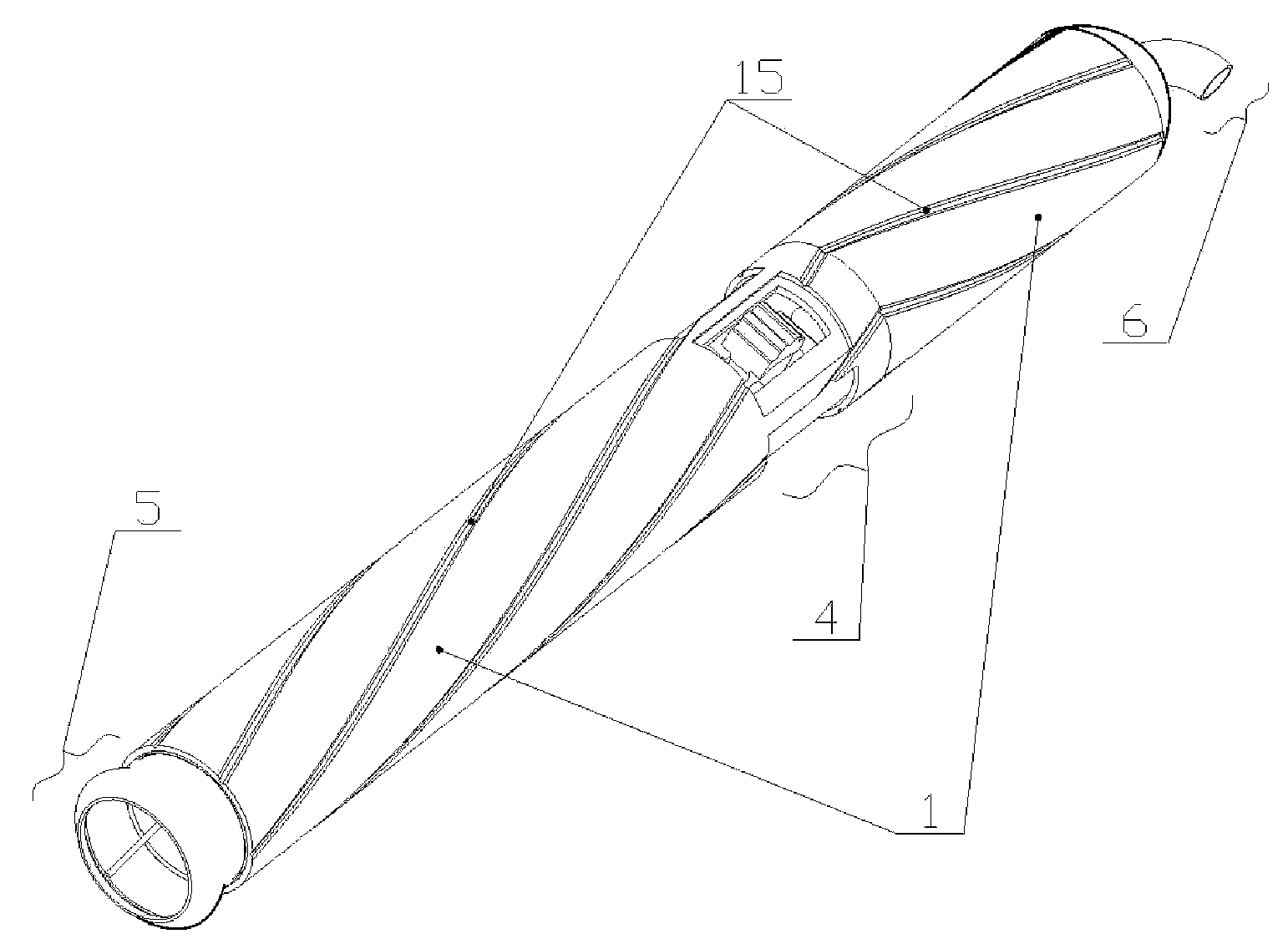
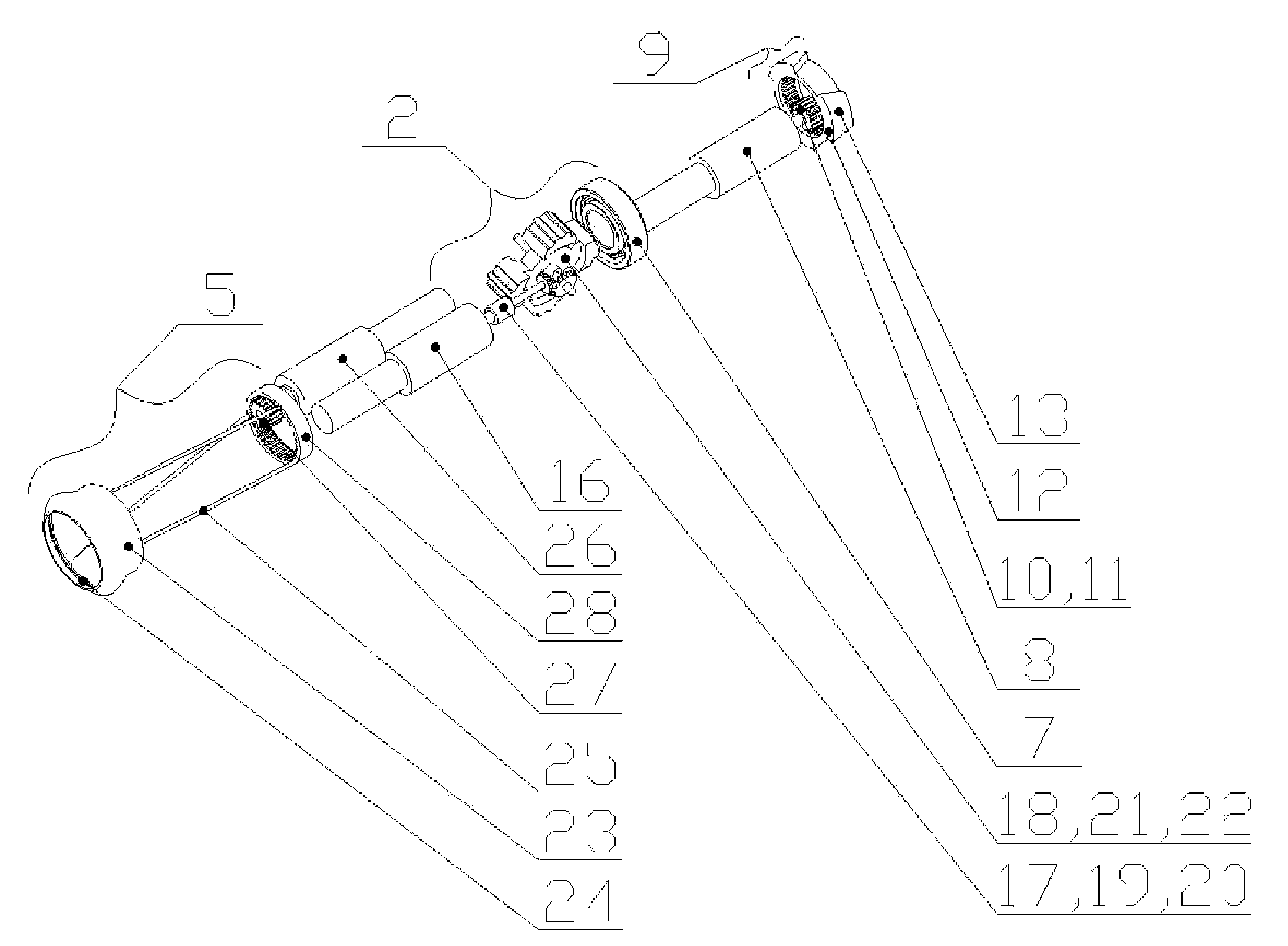
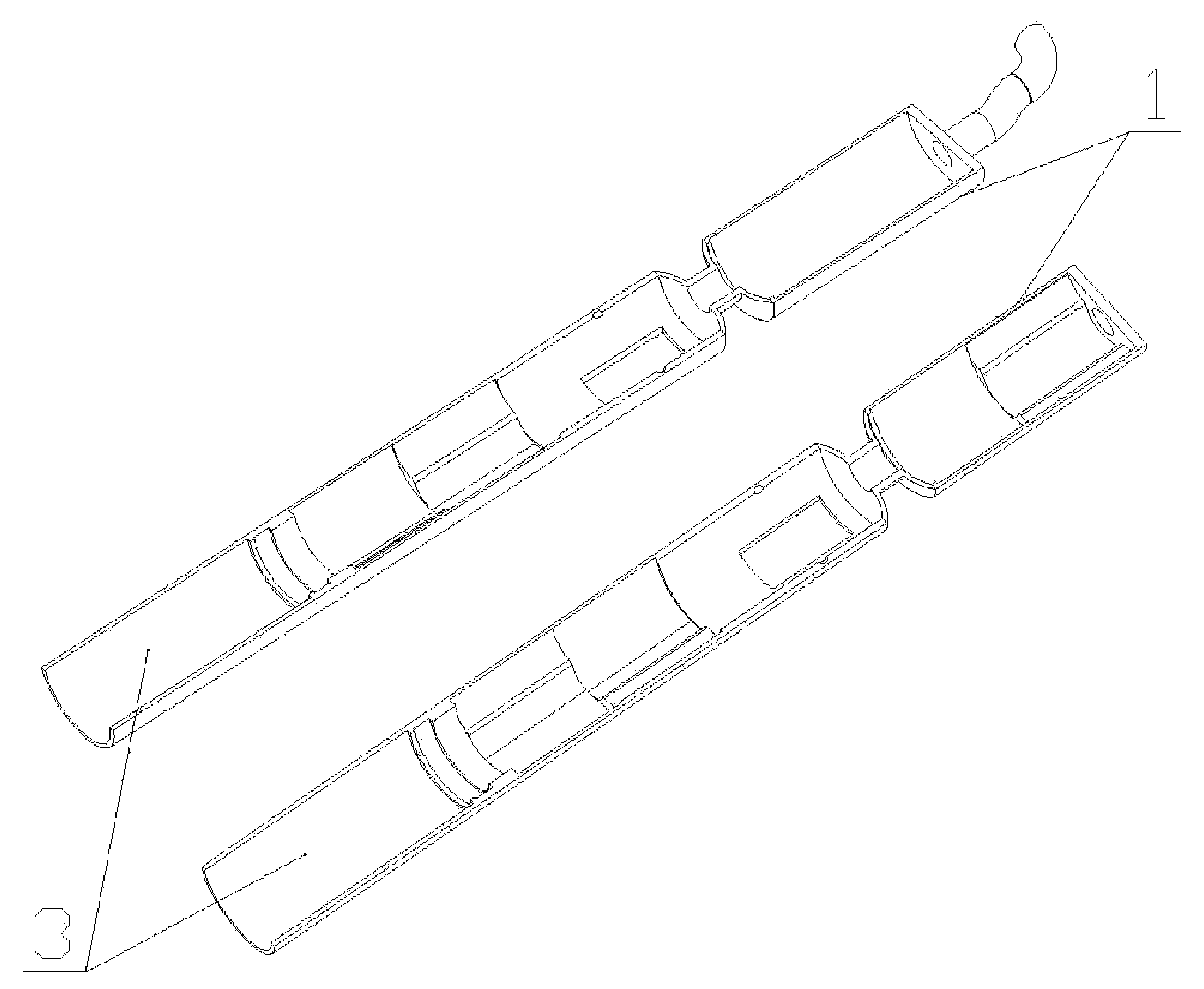
[0025] Such as Figure 1 to Figure 7 As shown, this embodiment includes: an outer shell 1, a rotating structure 2, an inner shell 3, a translational structure 4, a bionic mouth structure 5 and an incoming line structure 6, wherein: the inner shell 3 is movably arranged inside the outer shell 1, and the rotating structure 2 is fixed It is arranged on the inner side of the outer shell 1 and contacts the inner shell 3 to drive the outer shell 1 to rotate relative to the inner shell 3 .
[0026] The rotating structure 2 includes: a miniature bearing 7, a rotating motor reducer group 8, and a rotating reducing structure 9, wherein: th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More