

High-tolerance flexibility capture mechanism for space environment
A space environment, large-tolerance technology, applied in the direction of manipulators, program-controlled manipulators, space navigation equipment, etc., can solve the problems of small capture tolerances and inability to meet the accuracy requirements of capture manipulators, and achieve large capture tolerances and small quality , capture the effect of small impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
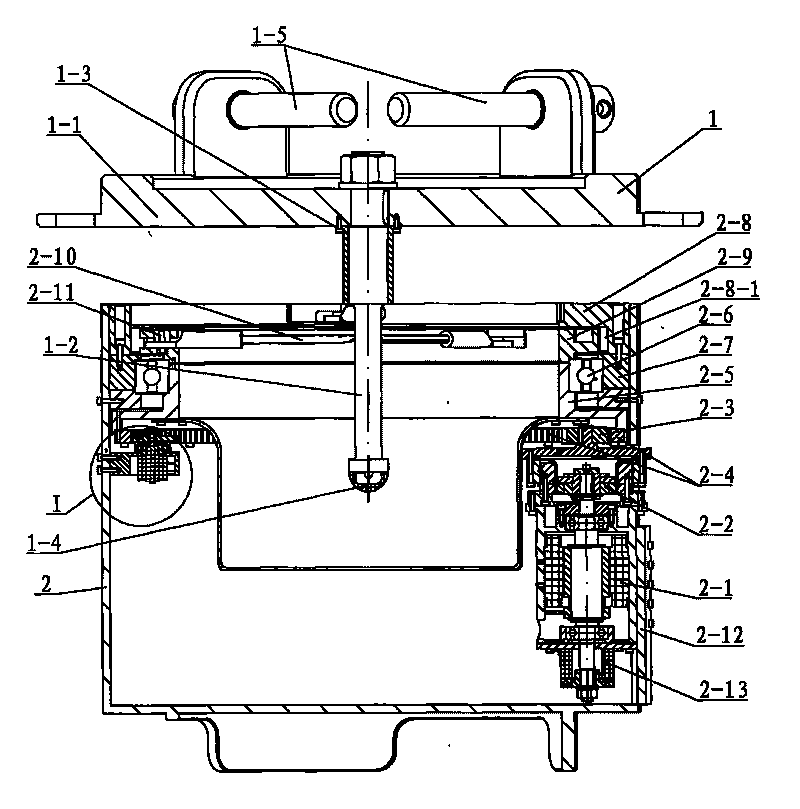
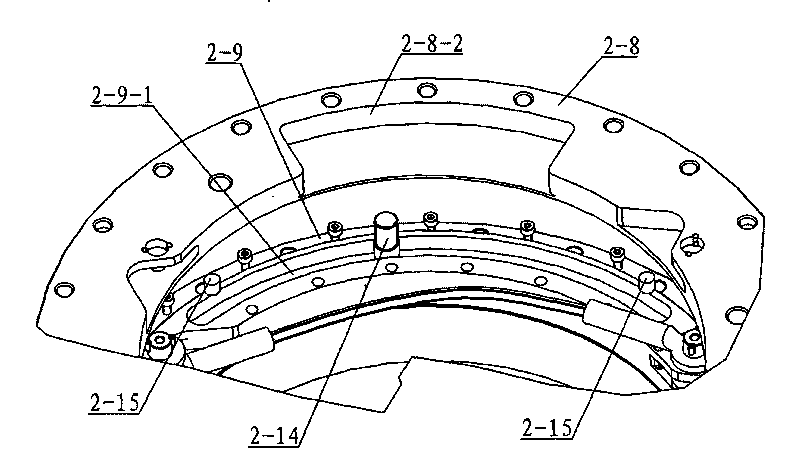
[0007] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment. This embodiment includes a capture interface device 1 and a capture device 2. The capture device 2 includes a DC brushless motor 2-1, a harmonic reducer 2-2, a pinion 2-3, an internal gear 2-4, Moment sensor 2-5, thin-wall bearing 2-6, connecting ring 2-7, fixed ring 2-8, rotating ring 2-9, three steel wire ropes 2-10, rotating shaft 2-11 and capturing support cylinder 2-12, harmonious The input end of the wave reducer 2-2 is connected to the output end of the DC brushless motor 2-1, and the DC brushless motor 2-1 and the harmonic reducer 2-2 are arranged at the lower part of the inner cavity of the capture support cylinder 2-12, And the DC brushless motor 2-1 is fixedly mounted on the inner wall of the capture support cylinder 2-12 through the connector, and the rigid wheel on the harmonic reducer 2-2 is fixedly connected with the side wall of the capture support cylinder 2-12 t...
specific Embodiment approach 2
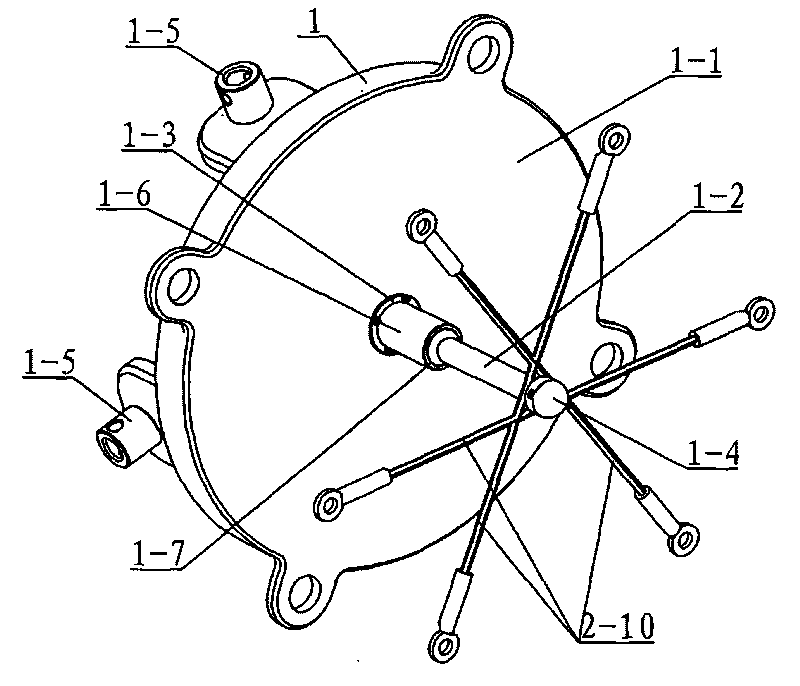
[0008] Specific implementation mode two: combination figure 1 and figure 2 To illustrate this embodiment, the capture interface device 1 of this embodiment includes a capture interface plate 1-1, a capture cone 1-2, a capture flange 1-3, a capture guide light 1-4 and at least three connecting pins 1-5, The upper end of the capture cone 1-2 is connected to the capture flange 1-3, and the assembly of the capture flange 1-3 and the capture cone 1-2 is vertically arranged at the lower end of the capture interface plate 1-1, and the capture flange 1-3 passes through The connector is fixedly connected to the lower end surface of the capture interface board 1-1, the capture guide light 1-4 is installed on the lower end of the capture cone 1-2, and at least three connecting pins 1-5 are evenly arranged on the bottom of the capture interface board 1-1. on the upper end face. Capture guide lights 1-4 play the role of capture guide. The capture interface device 1 is connected to the ...
specific Embodiment approach 3
[0009] Specific implementation mode three: combination figure 2 Describe this embodiment. The difference between this embodiment and the second embodiment is that the capture interface device 1 is further provided with a connecting shaft 1-6, and the connecting shaft 1-6 is arranged between the capturing flange 1-3 and the capturing cone 1-2. , and one end of the connecting shaft 1-6 is sleeved on the catching cone 1-2, and the other end of the connecting shaft 1-6 is connected with the catching flange 1-3. The purpose of this design is to form a step 1-7 between the catching cone 1-2 and the connecting shaft 1-6, and the step 1-7 can effectively prevent the wire rope from falling off. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More