

Moon-exploration mechanical arm modularization joint based on absolute position measurement
A modular joint, absolute position technology, applied in manipulators, program-controlled manipulators, space navigation equipment, etc., can solve problems such as the inability to directly provide global feedback of joint position information, signal fusion and cumbersome fusion algorithms, etc. Affected by electromagnetic interference, the effect of simplifying the design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
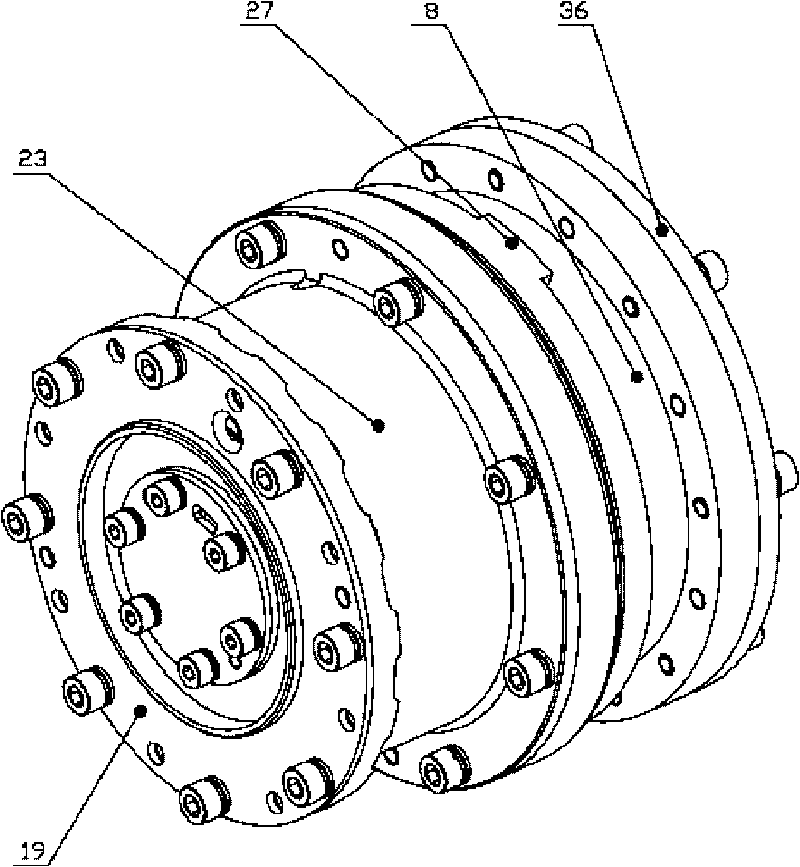
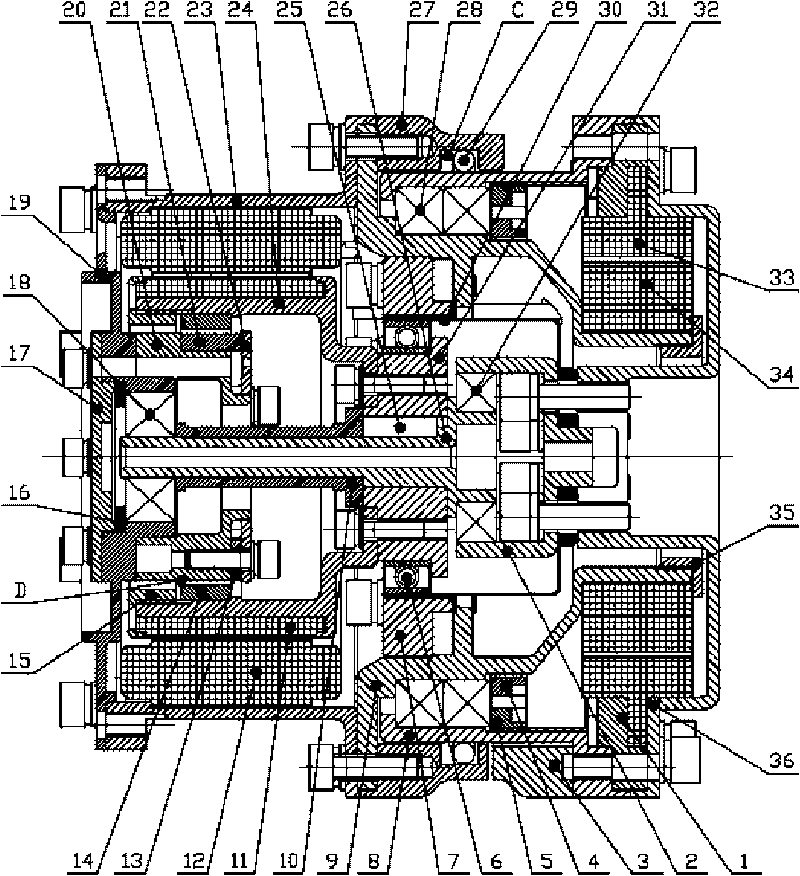
[0007] Specific implementation mode one: combine figure 1 Jung? 0 illustrates this embodiment. The modular joint of the manipulator in this embodiment includes an input device A, an output device B, a sealing device C, and a motor reversing device D. The input device A is composed of a DC brushless motor and a housing 23, so The DC brushless motor is installed in the casing 23, and the output device B includes the first radial bearing outer seat 2, the joint limit block 3, the inner ring baffle 4, the outer ring baffle 5, and the angular contact bearing outer seat 8 , Angular contact bearing inner seat 9, second radial bearing gland 17, second radial bearing 18, second radial bearing support seat 19, input shaft 26, back-to-back double angular contact bearing 28, input interface 31, the first A radial bearing 32, an output flange 36, a rotary transformer and a harmonic reducer; the sealing device C is composed of a sealing device flange 27 and an O-ring 29; the rotor yoke 24 ...
specific Embodiment approach 2
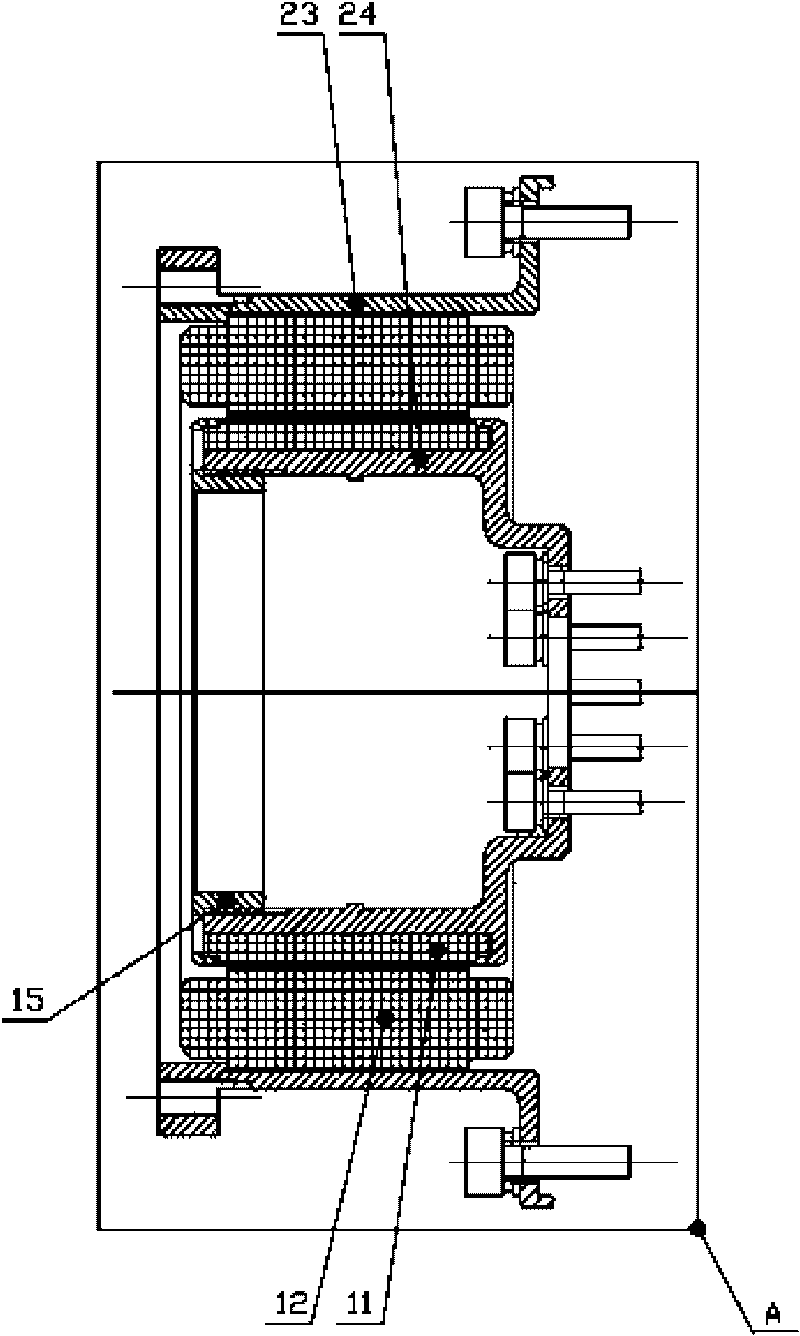
[0009] Specific implementation mode two: combination figure 2 and image 3 Describe this embodiment, the DC brushless motor of this embodiment is made up of rotor 11, stator 12 and rotor yoke 24, and described stator 12 and rotor 11 gap are arranged, and described rotor yoke 24 is arranged in stator 12, and described The rotor yoke 24 is arranged in the stator 12, and the inner diameter of the rotor yoke 24 is 28mm. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: combination figure 2 , Figure 4 and Figure 5 Describe this embodiment, the harmonic reducer of this embodiment is made up of flexspline 30, rigid spline 7 and wave generator 6, and described rigid spline 7 is sleeved on flexspline 30, and described wave generator 6 is installed on flexspline 30, the outer diameter of the flexible spline 30 is 26mm, and the outer diameter of the rigid spline is 40mm. Other components and connections are the same as those in the first embodiment.
PUM
| Property | Measurement | Unit |
|---|---|---|
| The inside diameter of | aaaaa | aaaaa |
| Outer diameter | aaaaa | aaaaa |
| Outer diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More