Underwater robot object detection device and detection method
A technology for underwater robots and target detection, which is applied to measuring devices, instruments, radio wave measurement systems, etc., and can solve problems such as extraction and description of target information without sonar data processing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in more detail below in conjunction with accompanying drawing example:
[0037] 1. System composition
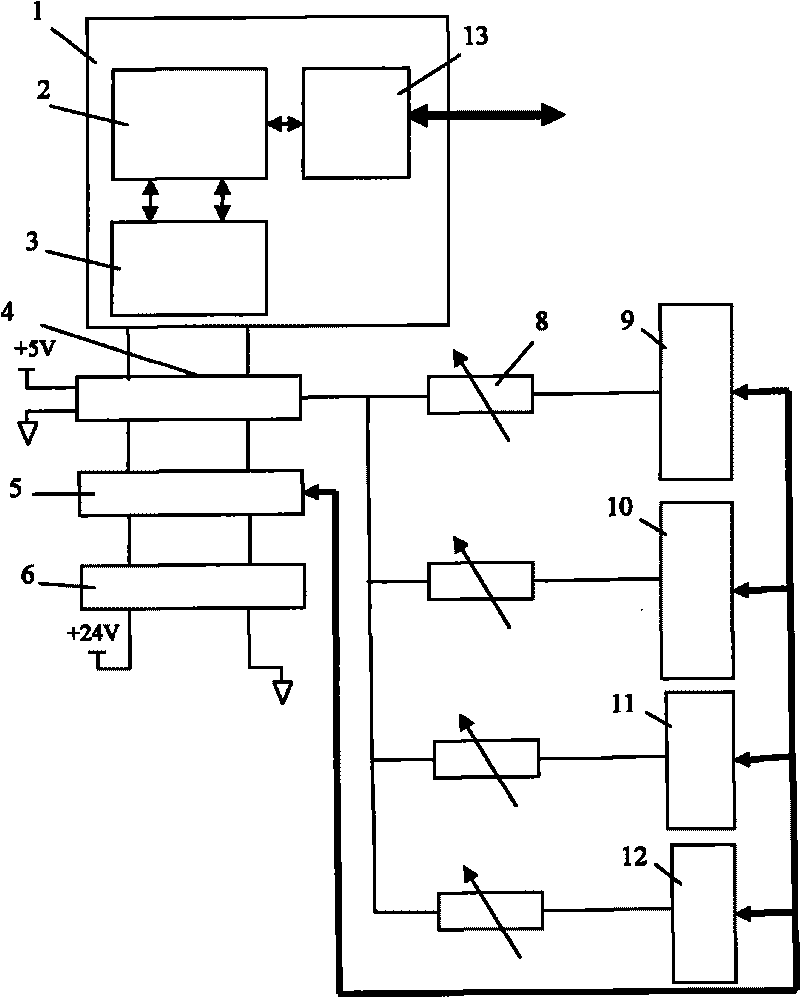
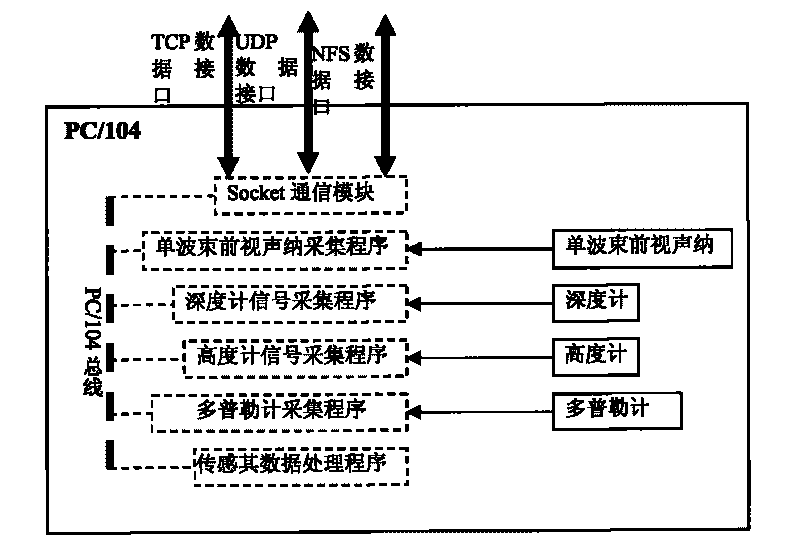
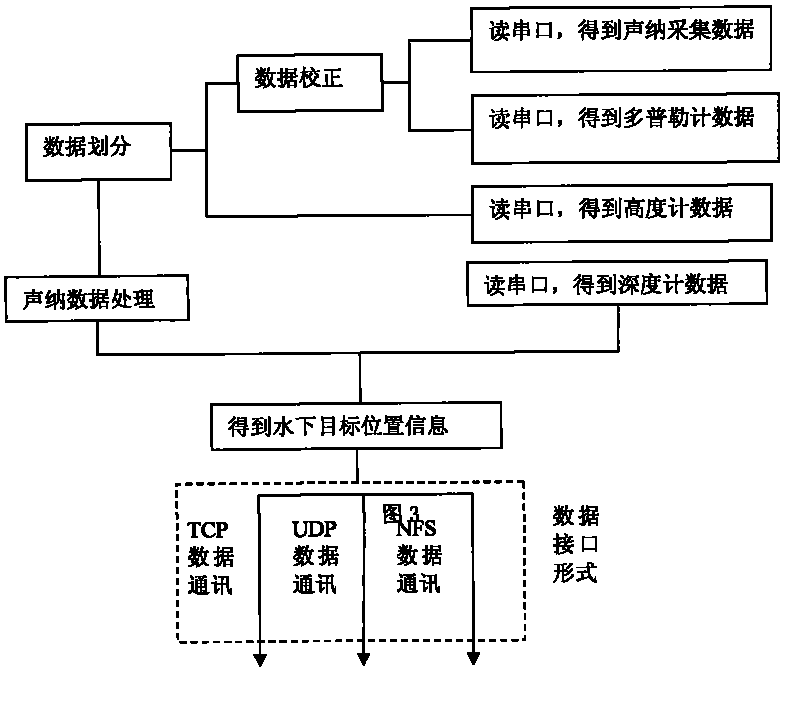
[0038] The single-beam visual sonar underwater robot detection system consists of a single-beam forward-looking sonar device sensor, PC104 computer, Doppler meter, altimeter, depth gauge and relay components. PC104 computer includes CPU core board, 8 serial port cards, DI\O board, power board. The whole system includes hardware architecture and software architecture, respectively as figure 1 and figure 2 As shown, the data flow is as follows image 3 shown. The following is divided into two parts:
[0039] (1) The hardware architecture of the underwater part
[0040] The single-beam forward-looking sonar, Doppler meter, altimeter, and depth gauge are arranged outside the underwater robot body. After the watertight cable is vulcanized and lengthened, it is connected to the PC / 104 computer in the cabin through the watertight plu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More