

Six-foot crawling robot
A crawling robot and robot technology, applied in the field of robotics, can solve the problems of a hexapod crawling robot with complex structure, simple control, and lack of human-controlled walking movements, and achieve the effects of simple structure, simple control, and reduced production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
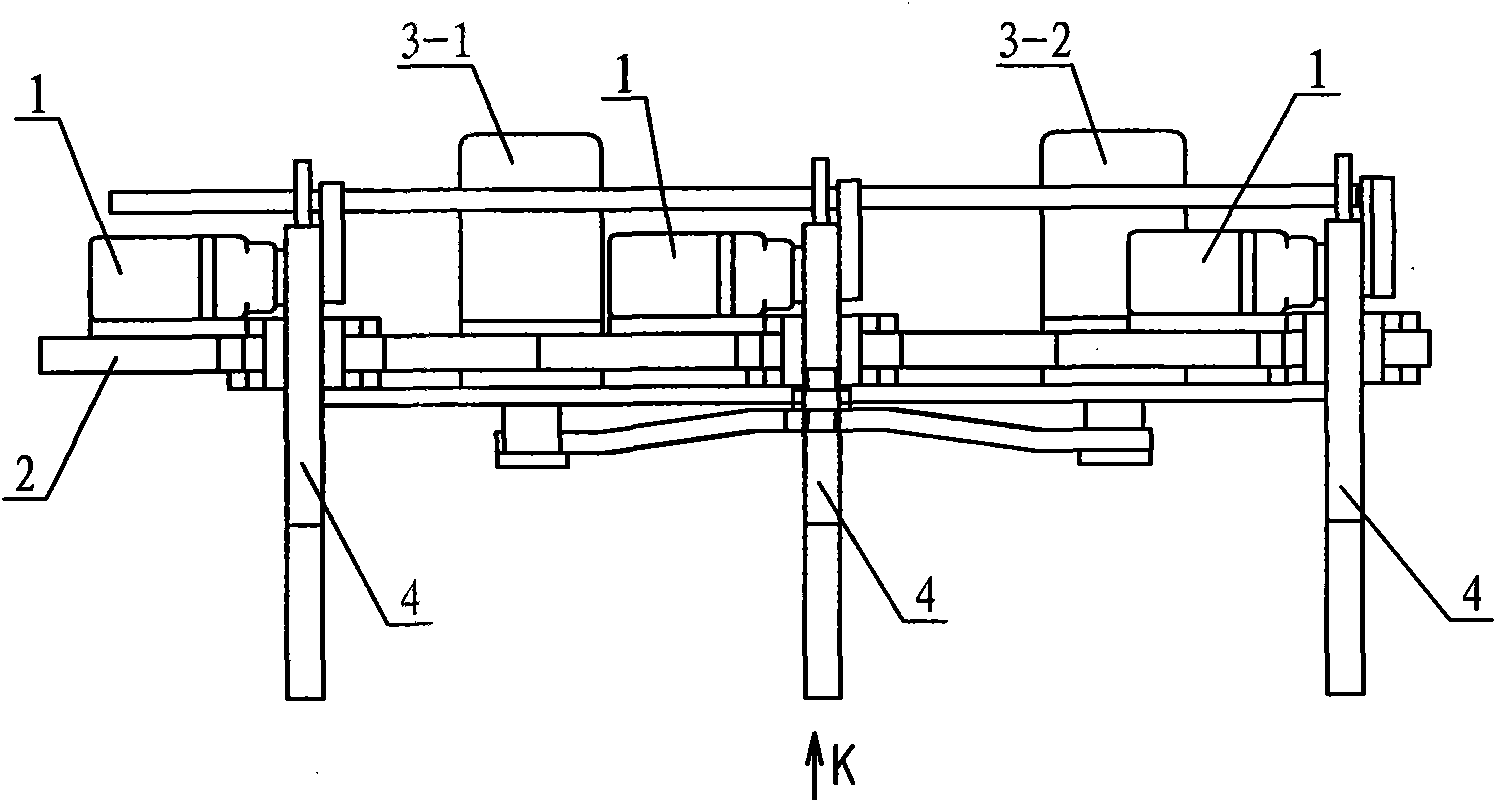
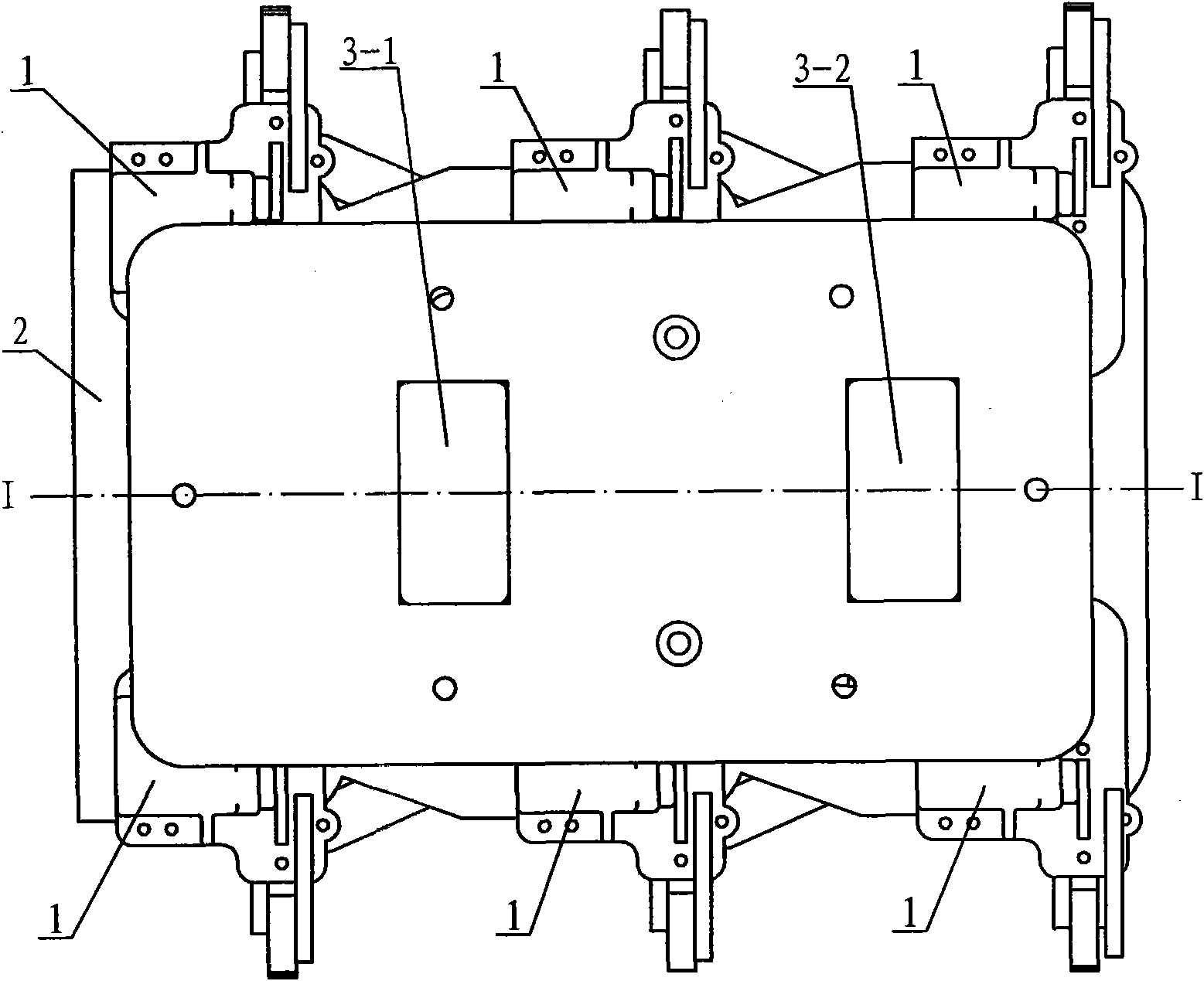
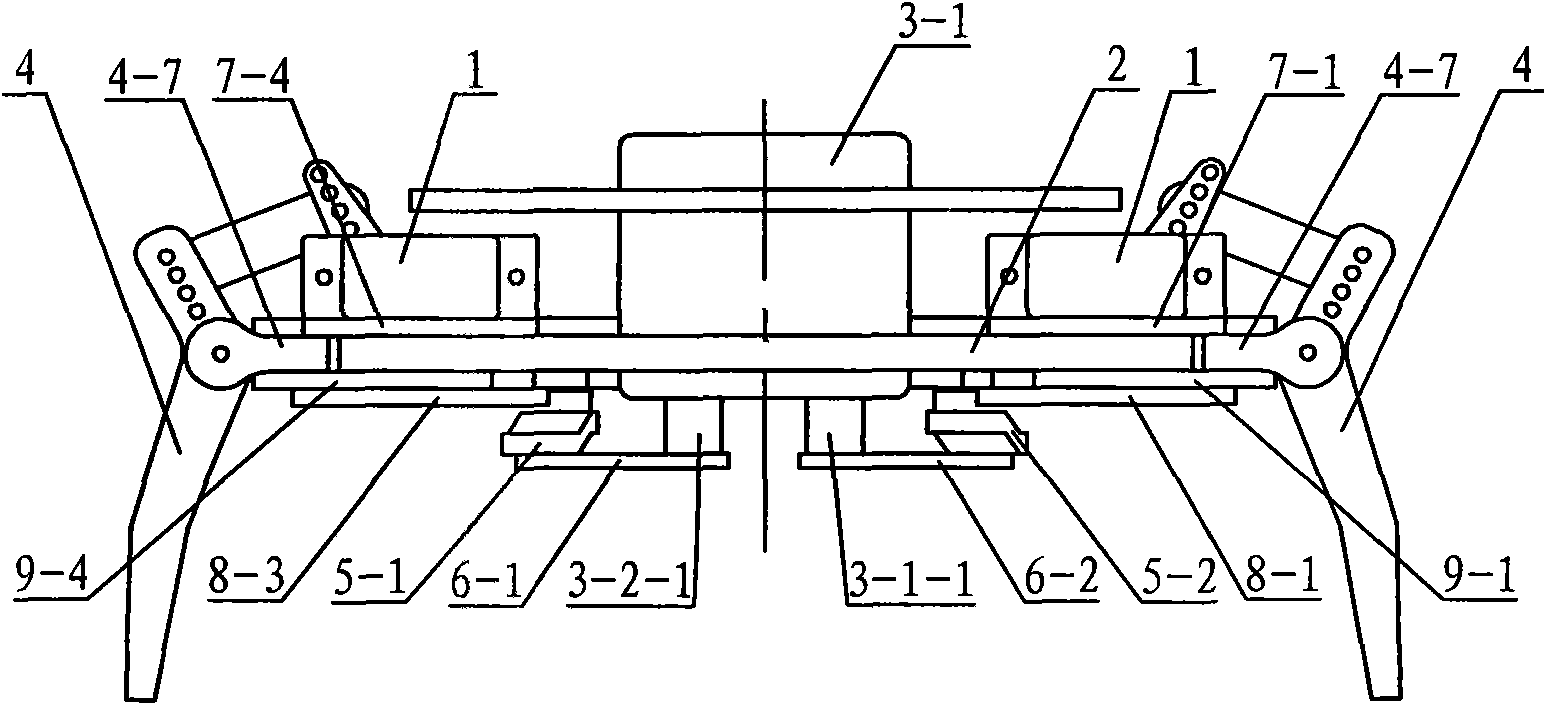
[0007] Specific implementation mode one: combine Figure 1 ~ Figure 4Describe this embodiment, this embodiment consists of six small steering gears 1, a main board 2, the first large steering gear 3-1, the second large steering gear 3-2, six foot mechanisms 4, and the first large steering gear pull rod 5 -1, the second largest steering gear pull rod 5-2, the first largest steering gear steering plate 6-1, the second largest steering gear steering plate 6-2, the first upper connecting plate 7-1, the second upper connecting plate 7 -2, the third upper connecting plate 7-3, the fourth upper connecting plate 7-4, the fifth upper connecting plate 7-5, the sixth upper connecting plate 7-6, the first connecting rod 8-1, the second connecting rod Rod 8-2, third connecting rod 8-3, fourth connecting rod 8-4, first lower connecting plate 9-1, second lower connecting plate 9-2, third lower connecting plate 9-3, fourth The lower connecting plate 9-4, the fifth lower connecting plate 9-5,...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination Figure 5 Describe this embodiment, each foot mechanism 4 of this embodiment is by the first connecting shaft 4-1, the second connecting shaft 4-2, the 3rd connecting shaft 4-3, pin 4-4, pin rod 4-5, Small steering wheel 4-6 and connecting seat 4-7 are composed, connecting seat 4-7 is hinged with pin 4-4 through first connecting shaft 4-1, pin 4-4 can rotate freely, pin 4-4 The upper end is hinged with an end of the second connecting shaft 4-2 and the pin rod 4-5, and the other end of the pin rod 4-5 is hinged with the small steering wheel 4-6 through the third connecting shaft 4-3. Other components and connections are the same as those in the first embodiment. Pin 4-4, pin pull bar 4-5, small steering wheel steering wheel 4-6 and connecting seat 4-7 constitute four-bar linkage. The small steering gear 1 drives the pin 4-4 through the small steering gear steering wheel 4-6 and the foot pull rod 4-5, thereby realizing the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More