

Advanced iterative learning control method for accurate target tracking
An iterative learning control and target tracking technology, applied in the field of precise target tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] 1. In the present invention, and Respectively represent the L of the function G(s) 2 Norm and L ∞ norm.
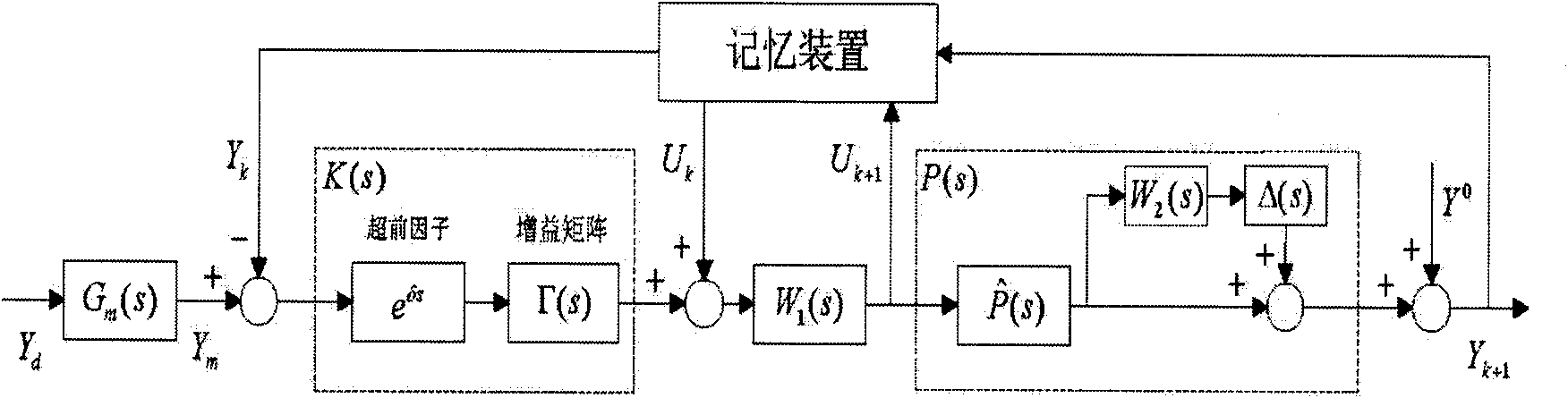
[0069] 2 pairs figure 1 For the described look-ahead iterative learning control system, the algorithm conditions for robust monotonic convergence are derived using (1)-(5) as follows:
[0070] Using (1)-(5) to solve the tracking error, we can know
[0071] E k + 1 - E * = W 1 PK 1 - W 1 ( 1 - PK ) Y d - PU k + 1
[0072] = W ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More