

Three-wheel inspection robot mechanism capable of crossing over catenary of pole and tower
An inspection robot and leap rod technology, which is applied in the directions of manipulators, overhead line/cable equipment, manufacturing tools, etc., can solve the problem of not mentioning inspection robot leaping and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0044] Embodiment 1 straddles the anti-vibration hammer
[0045] Anti-vibration hammer is a very common obstacle on power lines. Figure 2a to Figure 2h It shows the whole movement process of the inspection robot across the anti-vibration hammer.
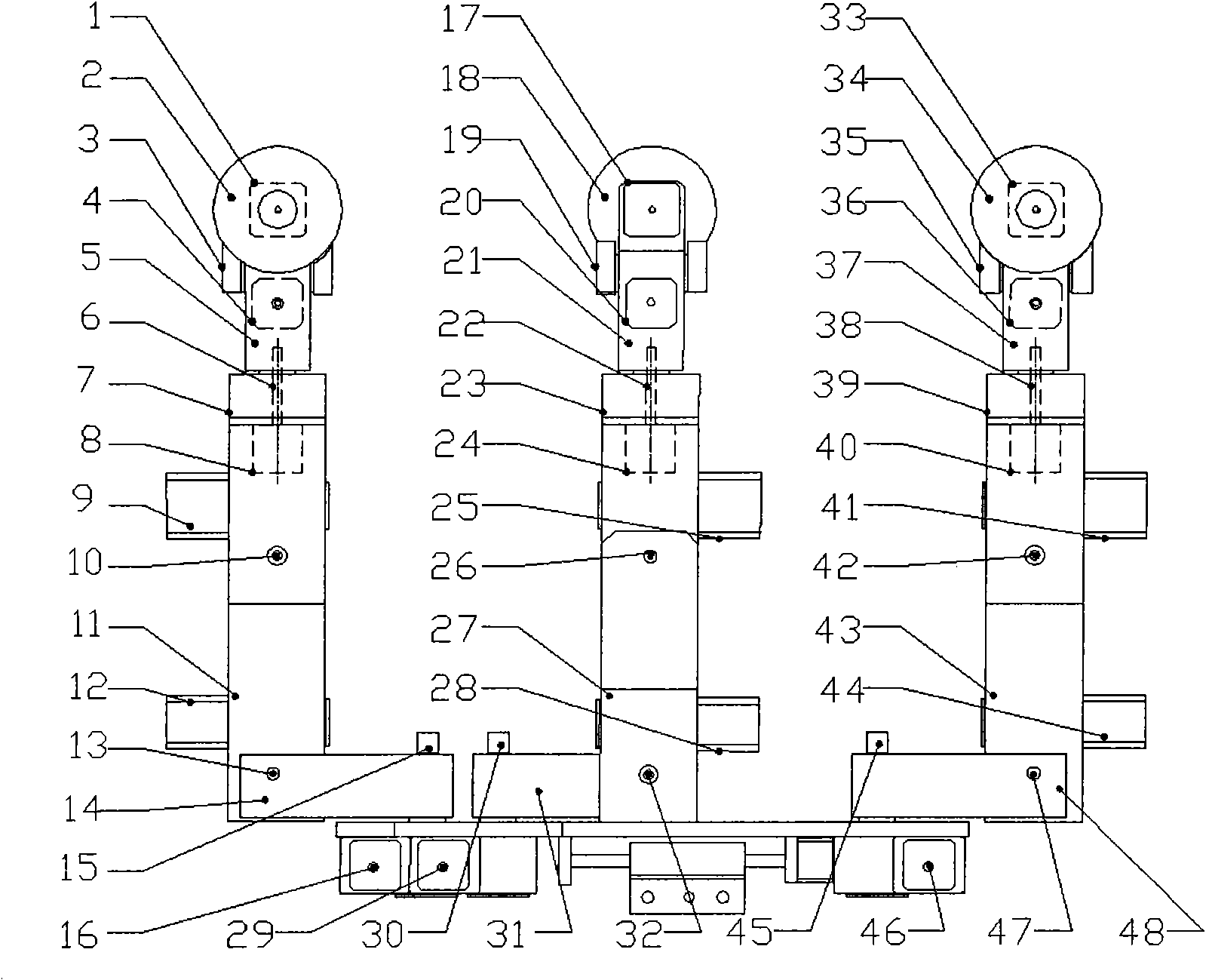
[0046] first step, such as Figure 2a As shown, when the inspection robot moves to the front of the anti-vibration hammer, it first stops moving. At this time, the middle arm (11, 27, 43) and upper arm (7, 23, 39) of the forearm group, middle arm group and rear arm group 1, wrists (5, 21, 37) are all in a vertical state, and are on a vertical line, and respectively maintain a vertical state with the lower arm (14, 31, 48). The handwheels (2, 18, 34) of the three arm groups are all on the power line. Three clamp hands (3,19,35) are in unclamped state.
[0047] The second step, such as Figure 2b As shown, the front hand wheel 2 of the forearm group is offline. Now, the middle arm 27 rotates counterclockwise with respect to the ...
Embodiment 2
[0054] Embodiment 2 Drainage conductor across the tower
[0055] first step, such as Figure 3a As shown, when the front hand wheel of the inspection robot arrives at the junction of the drain wire 59 and the power line 60 and stops moving, the middle arm (11, 27, 43), upper arm (7, 23, 39), wrist ( 5, 21, 37) are all in a vertical state, and on a vertical line, and maintain a vertical state with the lower arm (14, 31, 48). The hand wheels ( 2 , 18 , 34 ) of the three arm groups are all on the power line 60 . The three hands (3, 20, 35) are released.
[0056] The second step, such as Figure 3b As shown, the middle middle arm 27 of the middle arm group rotates counterclockwise with respect to the middle lower arm 31, and the middle upper arm 23 of the middle arm group rotates clockwise with respect to the middle middle arm 27 at the same speed. Meanwhile, the rear middle arm 43 of the rear arm group rotates clockwise with respect to the rear lower arm 48, and the rear uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More