

Device for preventing faulty operation for using accelerator as brake by mistake based on computer vision
A technology of computer vision and wrong operation, applied in the direction of computer parts, calculation, measurement devices, etc., can solve the problems of inaccurate distinction, poor control effect, wrong driving intention, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
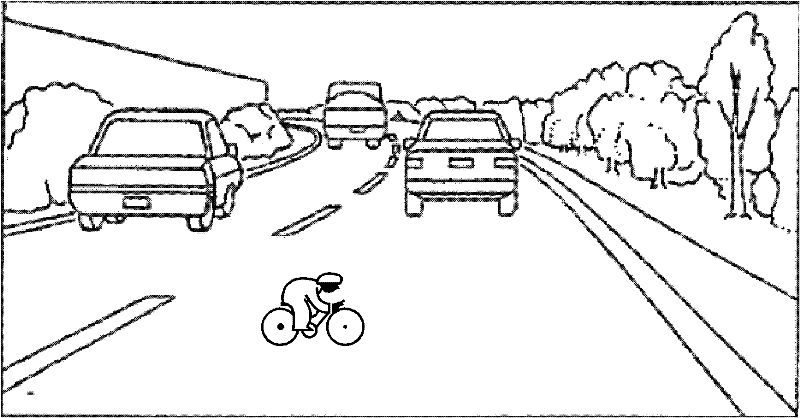
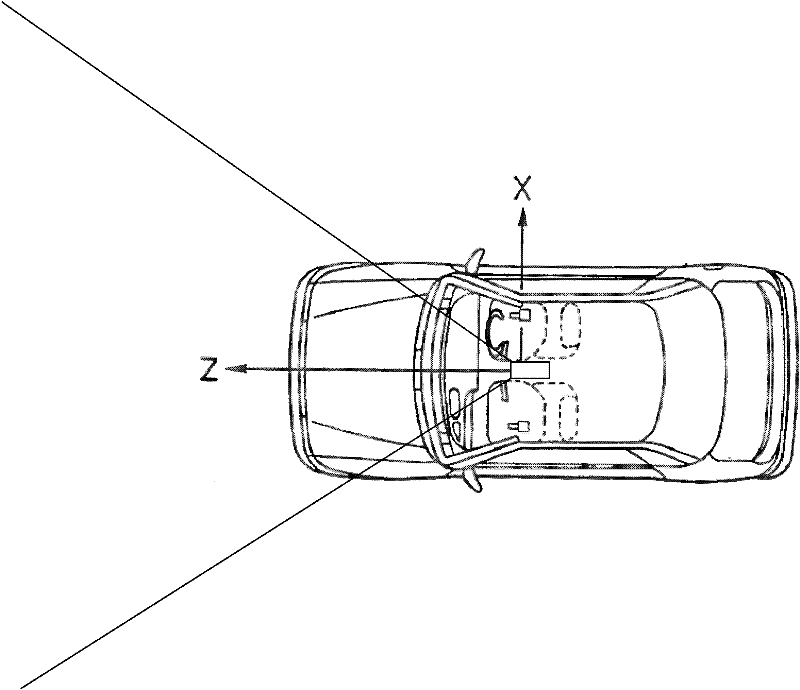
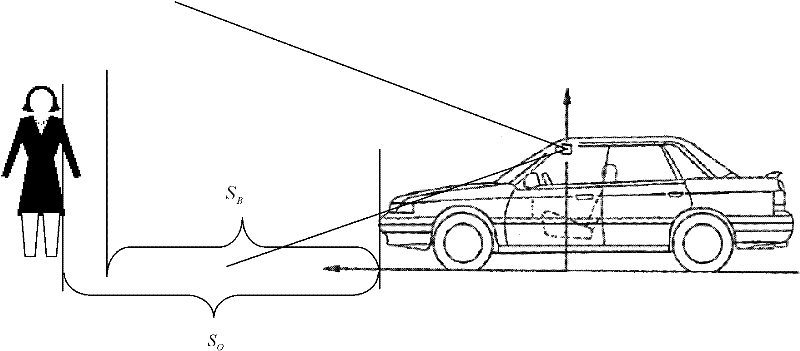
[0045] refer to Figure 1 to Figure 6 , a computer vision-based device for preventing misuse of the accelerator as a brake, including a visual sensor, an embedded system, a vehicle speed measurement unit, a vehicle driving angle measurement unit, a distance measurement unit, an audio alarm unit, an accelerator control unit, and a brake control unit and a power supply unit; the vision sensor is fixed on the top right of the driver's seat of the vehicle, and is used to capture video images of the road ahead of the vehicle, as attached figure 2 As shown; the embedded system, the sound alarm unit and the power supply unit are respectively fixed in the shell of the computer vision-based error prevention device such as using the accelerator as a brake, and the embedded system is used to read the driving of the vehicle Speed, vehicle steering wheel angle and video information of the road in front of the vehicle are used to estimate the obstacle distance on the road ahead, and calcul...
Embodiment 2
[0085] refer to Figure 1 to Figure 6 , In the present embodiment, only one detection means in the detection methods such as radar, laser and ultrasonic is adopted for the detection of the obstacle ahead.
Embodiment 3
[0087] refer to Figure 1 to Figure 6 , the coefficient of friction μ in the formula (1) is corrected according to the road conditions in the present embodiment, and the value of the coefficient of friction μ for the gravel road surface is 0.65; the value of the coefficient of friction μ for the road surface in rainy days is 0.7; The friction coefficient μ of the road surface is 0.45, and other structures and working processes of this embodiment are the same as those of Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More