

Control method of PID controller
A control method and controller technology, which is applied in the field of PID controllers, can solve problems such as large overshoot, poor dynamic characteristics, integral saturation, etc., and achieve the effects of improving accuracy, improving dynamic response, and eliminating static errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
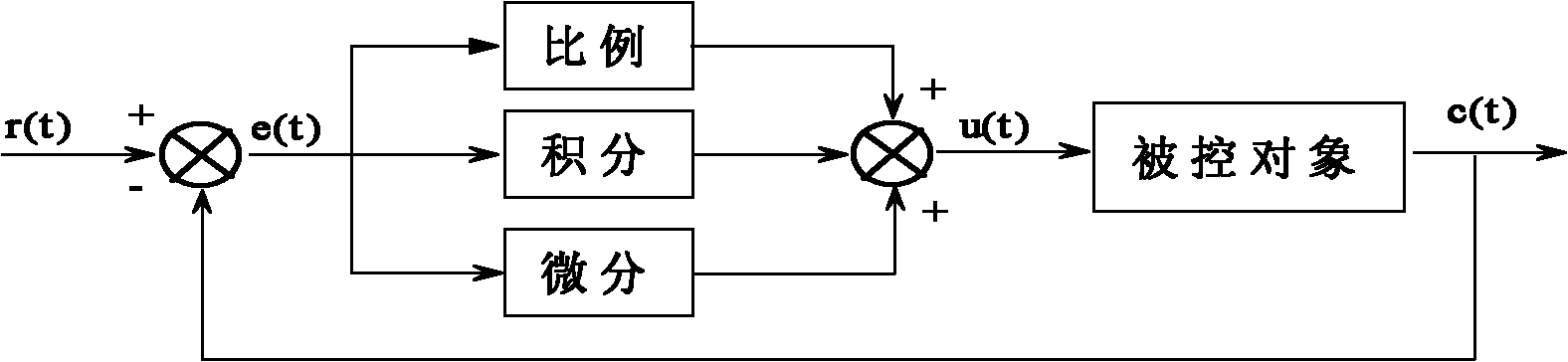
[0018] Assuming that the set value of the PID controller is r(t) and the actual value c(t), then the deviation value e(t) is r(t)-c(t), and the deviation value is proportional, integral and summed below differential operation.
[0019] 1) Proportional operation is performed on the deviation value e(t) to obtain the output value U of the proportional part P , the calculation formula is: U P =e(t)×K p , where K p Indicates the proportionality factor.
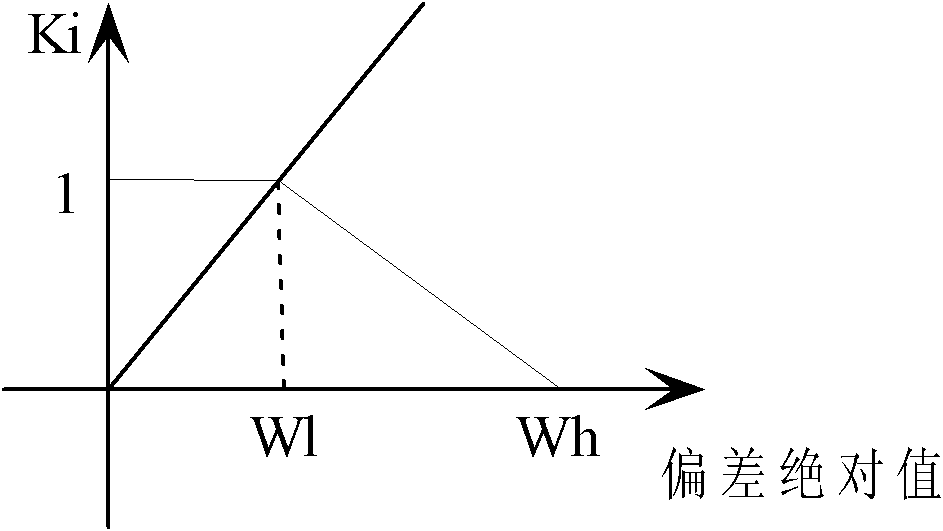
[0020] 2) Perform variable speed integral calculation on the deviation value e(t), compare the deviation value e(t) with the set value of the variable speed integral, the larger the deviation, the slower the integration, the larger the integral coefficient Ki, the smaller the deviation, the smaller the integral coefficient The smaller the Ki, the faster the integration; see image 3 , Wl and Wh are integral windows. When the absolute value of the deviation is less than Wl, the integral coefficient Ki is 1. When the absolute v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More