

Method for designing high-emulation silica gel intelligent acupuncture and moxibustion teaching robot
A technology for teaching robots and design methods, applied in teaching models, instruments, educational tools, etc., can solve problems such as increasing teaching workload and limiting the training of acupuncturists
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
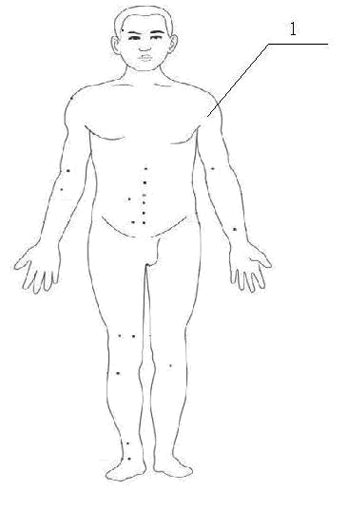
[0034] Such as figure 1 As shown, the design method of the high-simulation silicone intelligent acupuncture teaching robot is as follows: high-simulation silicone human body 1 and simulation human acupuncture point mechanism 2, high-simulation silicone human body 1 is proportional to the structure of the human body, high-simulation silicone human body 1 has simulated human muscles , skin and simulated human acupuncture points mechanism 2.
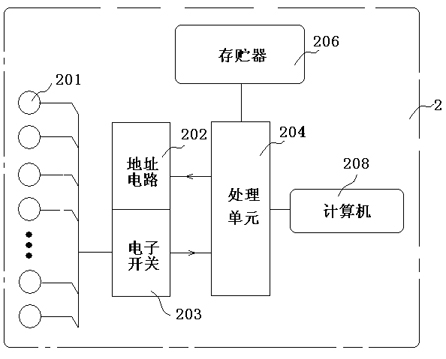
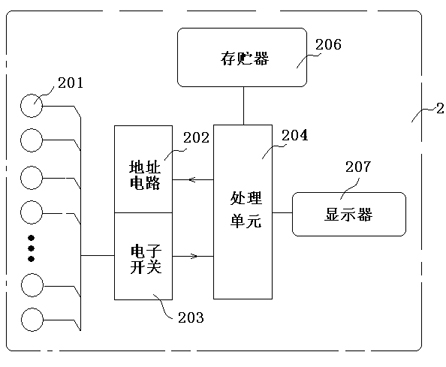
[0035] The simulated human acupoint mechanism 2 includes an acupoint sensing unit 201, a processing unit 204 and an output unit. Each acupoint sensing unit 201 is electrically connected to the processing unit interface respectively, and is electrically connected to the output unit by the output port of the processing unit. The signal change of the sensing unit 201 is transmitted to the processing unit 204, and after being processed by the processing unit 204, the output unit electrically connected to the output port of the processing unit p...
Embodiment 2
[0040] The simulated human acupoint mechanism 2 includes: an acupoint sensing unit 201, an address circuit 202, a switch circuit 203, a processing unit 204, and an output unit. There is an acupoint sensing unit 201 at the acupoint position of the highly simulated silicone human body 1, that is, the acupoint sensing unit 201 are distributed in the corresponding acupoint positions of the high-simulation silicone human body 1, simulate acupuncture to the acupoint sensing unit 201 of the simulated human acupoint mechanism 2, and the output unit of the simulated human acupoint mechanism 2 outputs response information. The acupuncture point sensing unit 201 is a conductive rubber acupuncture point sensor, and is a multi-layer conductive rubber layer. When the acupuncture point is wrong or the depth is incorrect, the robot can give voice prompts, and students will make corrections according to the voice prompts of the robot. The position of the electrode in the conductive rubber is s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More