

Kalman filter prediction-based robot obstacle avoidance method
A Kalman filter and robot technology, applied in the direction of using feedback control, etc., can solve the problems of use limitation, inability to avoid collision online, difficult to have prior knowledge, etc., and achieve the effect of simple implementation and good real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
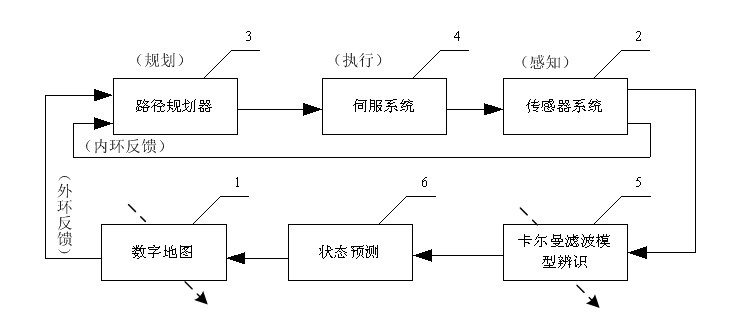
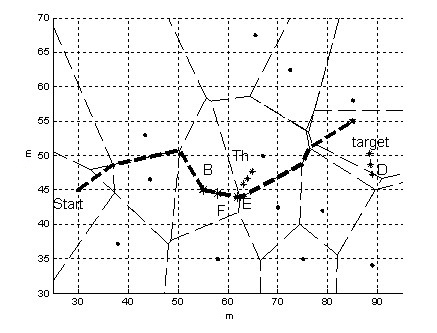
[0058] figure 2 The robot initial path and the maneuvering target Kalman filter model state prediction trajectory shown in the figure, the robot and the maneuvering target move in a two-dimensional horizontal plane within the range of 90m × 70m. in:
[0059] Robot initial position: Start;
[0060] Dynamic target point: target.
[0061] Before the robot merges with the target, it must first arrive at the reconnaissance point B to complete a certain task;
[0062] The set of obstacles to avoid, the position of each obstacle ( Z x (i), Z y (i)), i= {1, 2, -- , N}, in the example, N is 12;
[0063] After the robot arrived at mission point B, its airborne sensors discovered a new low-to-medium speed maneuvering target;
[0064] The maneuverability of the robot is superior to other maneuvering targets;
[0065] The constraint condition of the robot's route planning is the shortest time to reach the goal under the premise of avoiding collisions;
[0066] The robot's maneuv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More