

IPhone smart phone based robot human-machine interactive system
A human-computer interaction and smart phone technology, applied in transmission systems, electrical components, telephone communication, etc., can solve the problems of inconvenient use of robot control human-computer interaction systems, such as inconvenience and closed special use, and achieve the goal of improving control convenience and breaking through the limitation of control distance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
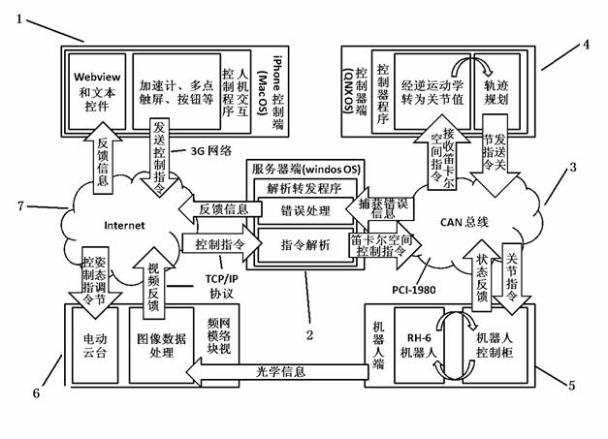
[0023] This machine-computer interaction system adopts an open system structure, and divides control interaction equipment, control command analysis, robot motion control, etc. into separate independent modules. Each module is developed using a common platform (Linux, Windows) and programming language (C, C++). There are independent and loose interfaces between the modules, and the relevant parts can be expanded or cut according to specific needs.
[0024] Such as figure 1 , the computer-computer interaction system mainly includes the iPhone control terminal (1), the server terminal (2), the controller terminal (4), the robot terminal (5) and the image acquisition module (6). The control information is sent from the iPhone control terminal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More