

Tube and wire feeding device for intravascular intervention surgical robot
A technology of interventional surgery and wire feeding device, which is applied in surgical robots, surgery, medical science, etc., can solve the problems of many branches, long operation time, and affecting the quality of surgery, and achieve the effect of easy operation and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
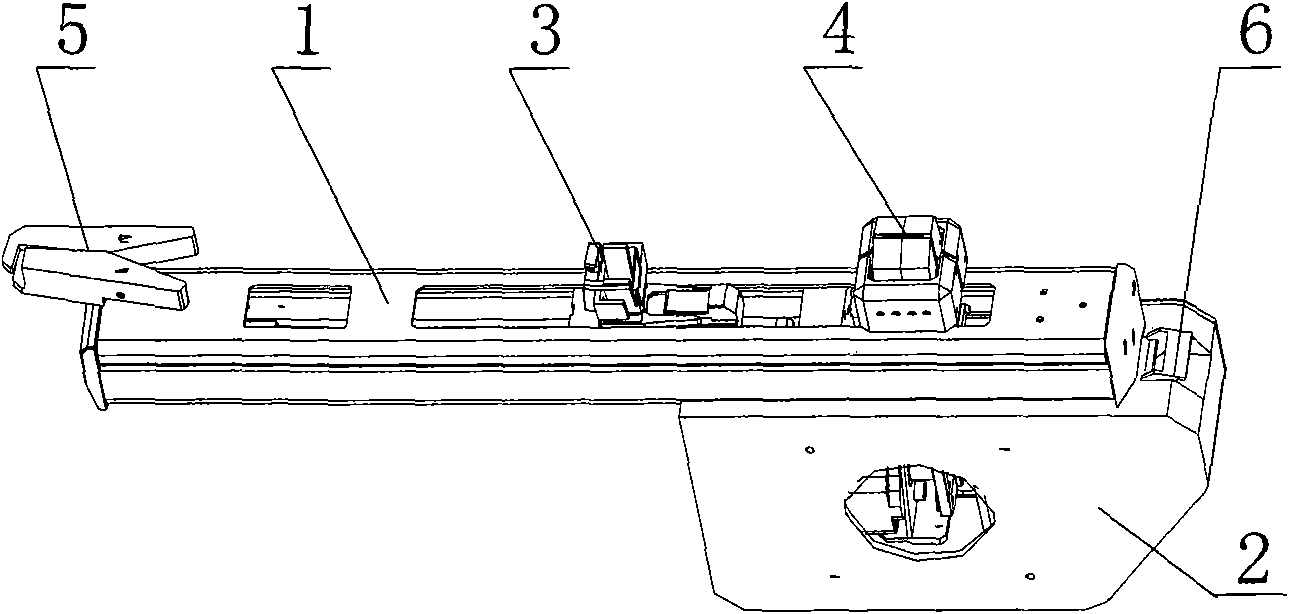
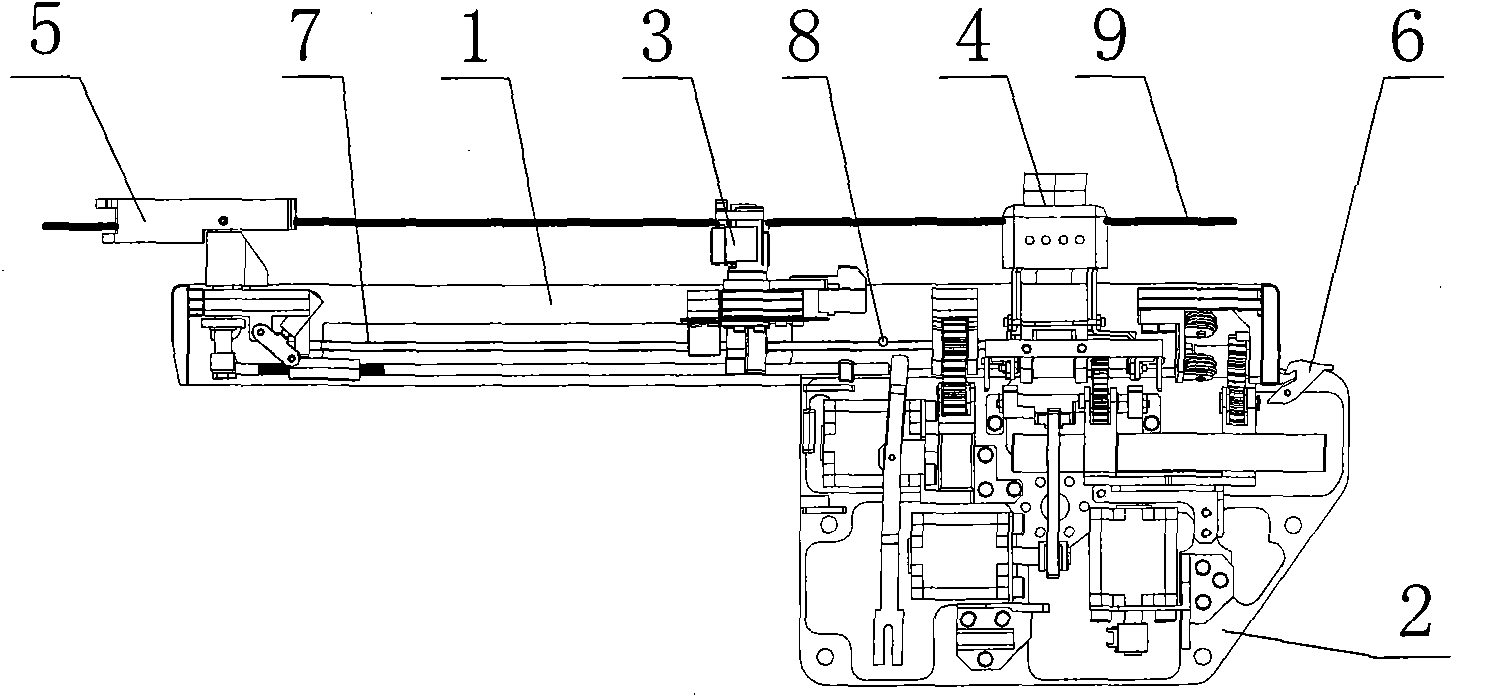
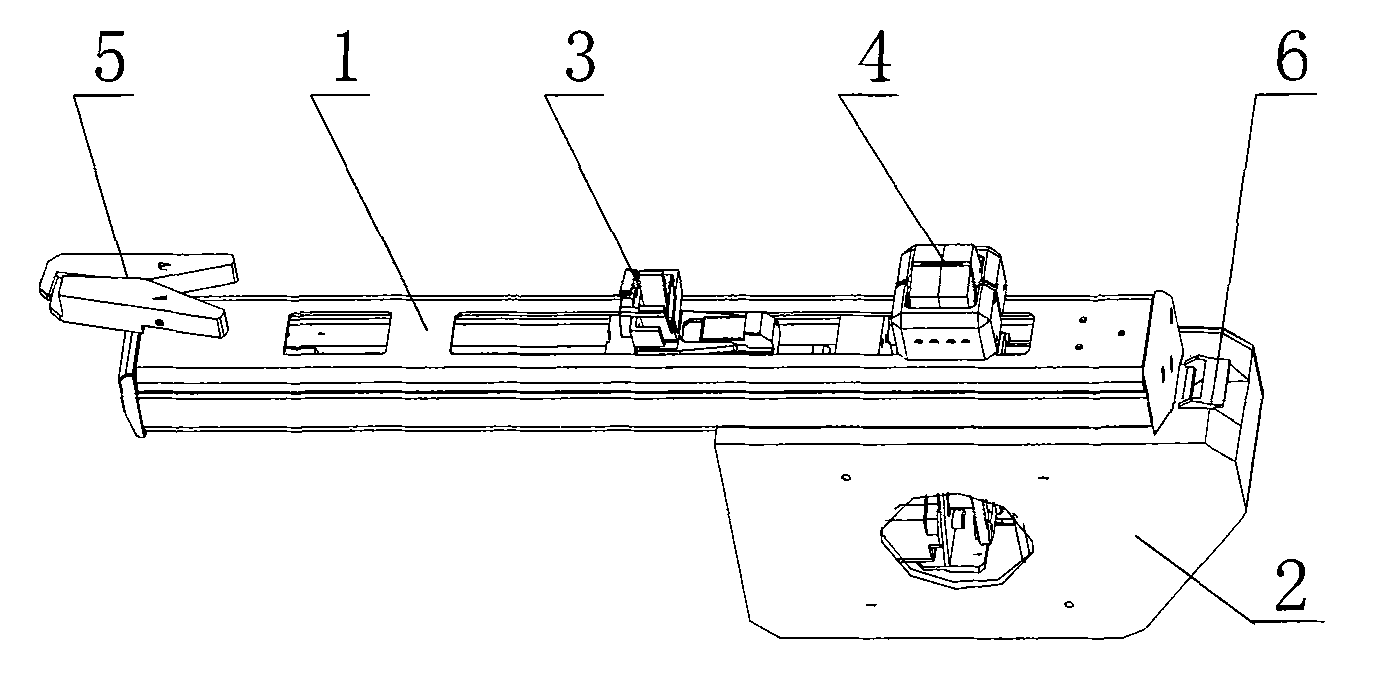
[0013] The present invention is used as an end effector of a robot for minimally invasive vascular interventional surgery, wherein the execution part 1 and the drive part 2 are connected together through a lock 6 . Tube feeding and wire feeding devices can be further divided into intervention of catheters and intervention of surgical tools such as guide wires, micro guide wires, and balloons.
[0014] Catheter Vascular Intervention:
[0015] 1. Insert the front end of the catheter into the blood vessel, manually open the moving finger 3, the rotating finger 4 and the clamping finger 5 in sequence, put the catheter into it and clamp it sequentially.
[0016] 2. Press the switch of the operating handle to open the clamping finger 5 and the rotating finger 4, and clamp the moving finger 3; then, move the operating handle forward to advance the moving finger 3, and drive the catheter into the deep blood vessel; when When the moving finger 3 advances to a certain position, loosen ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More