

Autonomous underwater vehicle combined navigation system
A combined navigation system and underwater robot technology, applied in surveying and navigation, radio wave measurement system, navigation through speed/acceleration measurement, etc., can solve the problem of inapplicable local sea area accurate autonomous navigation, scanning imaging sonar can not achieve autonomy Navigation and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings.
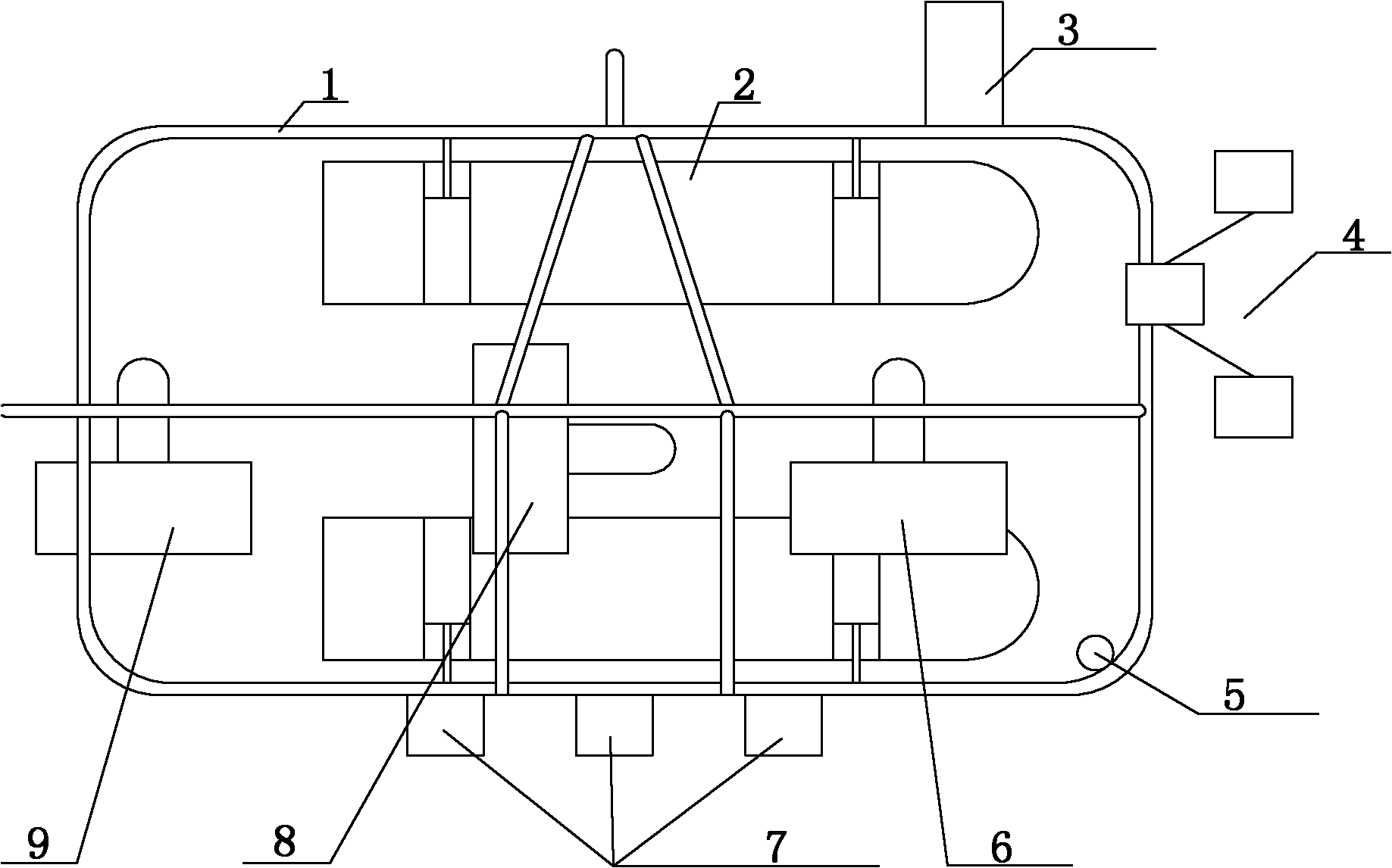
[0024] Such as figure 1 Shown is the autonomous underwater vehicle of the present invention. The robot adopts an open-frame mechanical structure. The upper and lower double-layer pressure chambers 2 are fixed on the outer frame 1, and five underwater propellers are set, including three vertical propellers and two horizontal propellers 8. The left and right symmetrical sides of the portion are respectively provided with a vertical propeller 6, and the left and right symmetrical sides of the middle part of the outer frame 1 are respectively fixed with a horizontal direction propeller 8; There is a vertical direction propeller 9, and pressure sensor is installed on the top of this propeller.
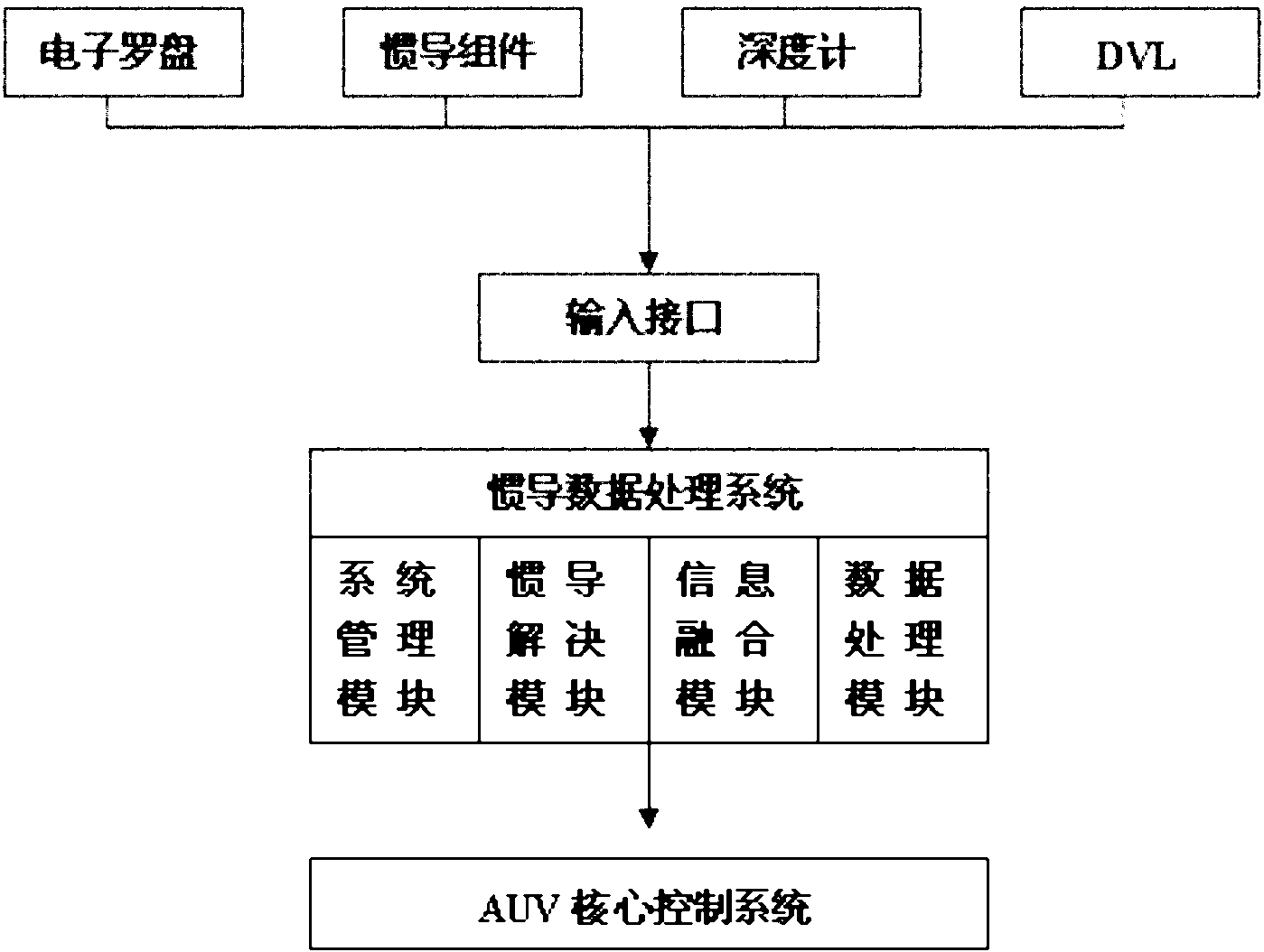
[0025]The navigation system of the autonomous underwater robot includes an inertial-based navigation device and an external sensor navigation device, wherein the inertial-based na...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More