

Robust real-time on-line camera tracking method
A camera, robust technology, applied in image communication, computer components, color TV components, etc., can solve problems such as camera shake, image blur, and insufficient resistance, so as to avoid unreliable estimation and reduce errors and mistakes , the effect of improving time efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
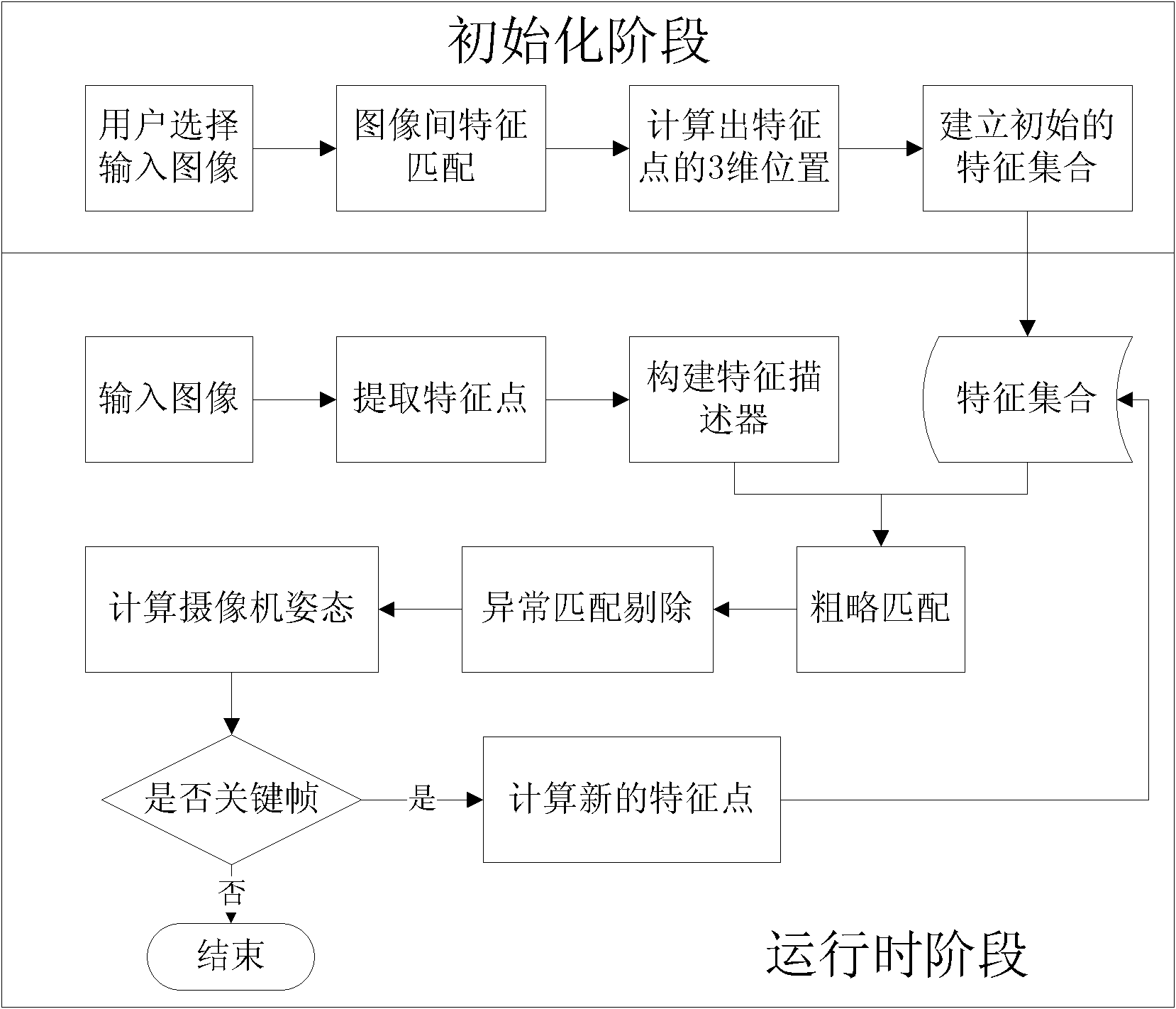
[0023] Such as figure 1 As shown, the implementation process of the present invention includes two parts, the initialization phase and the runtime phase.
[0024] The first stage: the initialization part includes five steps: selecting the input image, extracting feature points in the image, matching features between images, calculating the three-dimensional position of feature points, and establishing an initial set of feature points.
[0025] Step 1: Select an input image.
[0026] The user selects two frames of images with similar content as the initial input image to determine the starting position of the system according to their actual needs, such as the superimposed position of the virtual object in the augmented reality application, the starting position of the navigation in the autonomous navigation application, etc. . The system takes the starting position as the origin of the world coordinate system, and establishes the world coordinate system based on the common p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More