

Spherical robot driven by double eccentric mass blocks
A spherical robot and eccentric drive technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of poor power performance of robot drive units, inability to make full use of motor drive capabilities, and failure to provide, etc., to achieve flexible turning, simple structure, and improved power performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
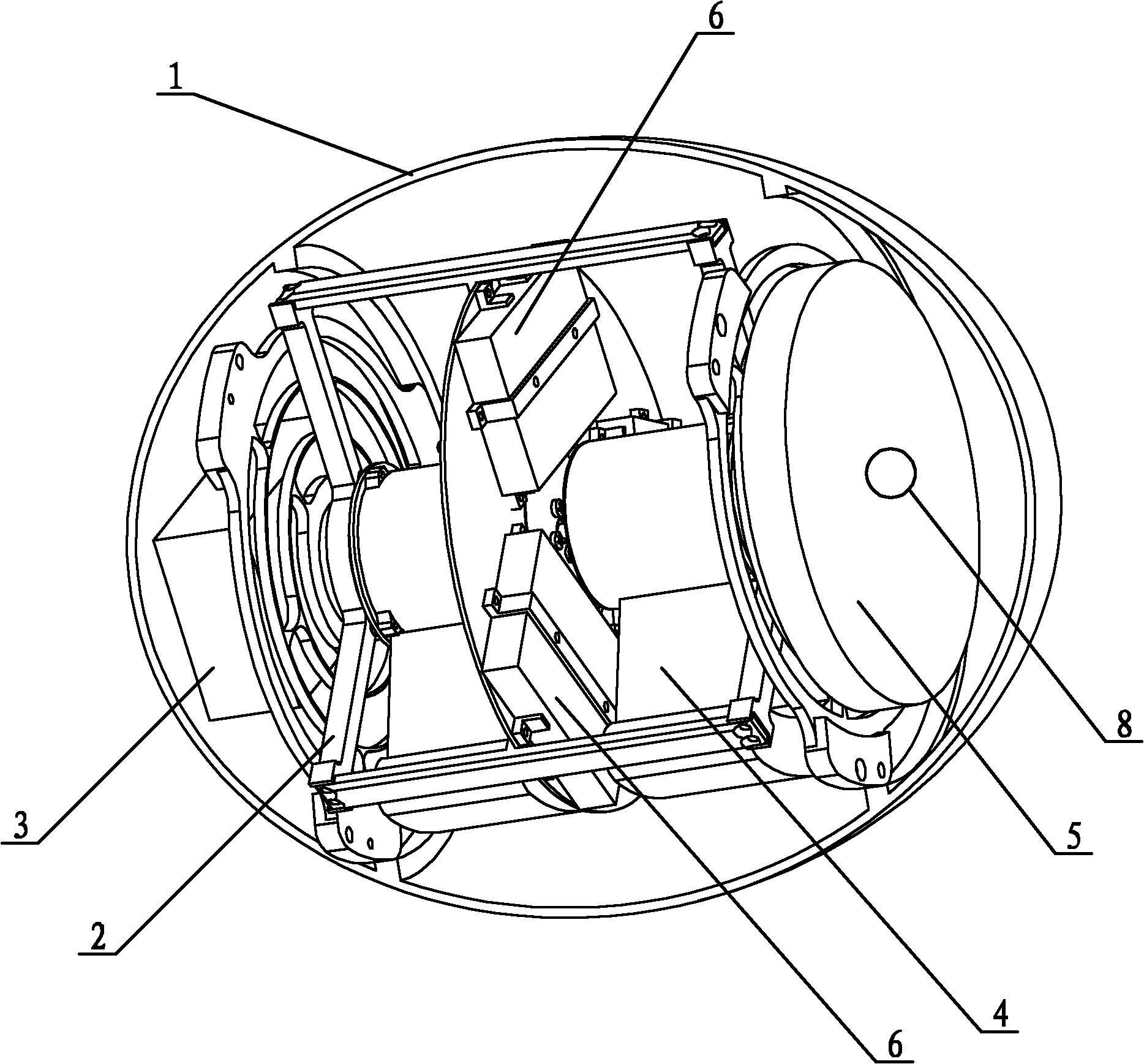
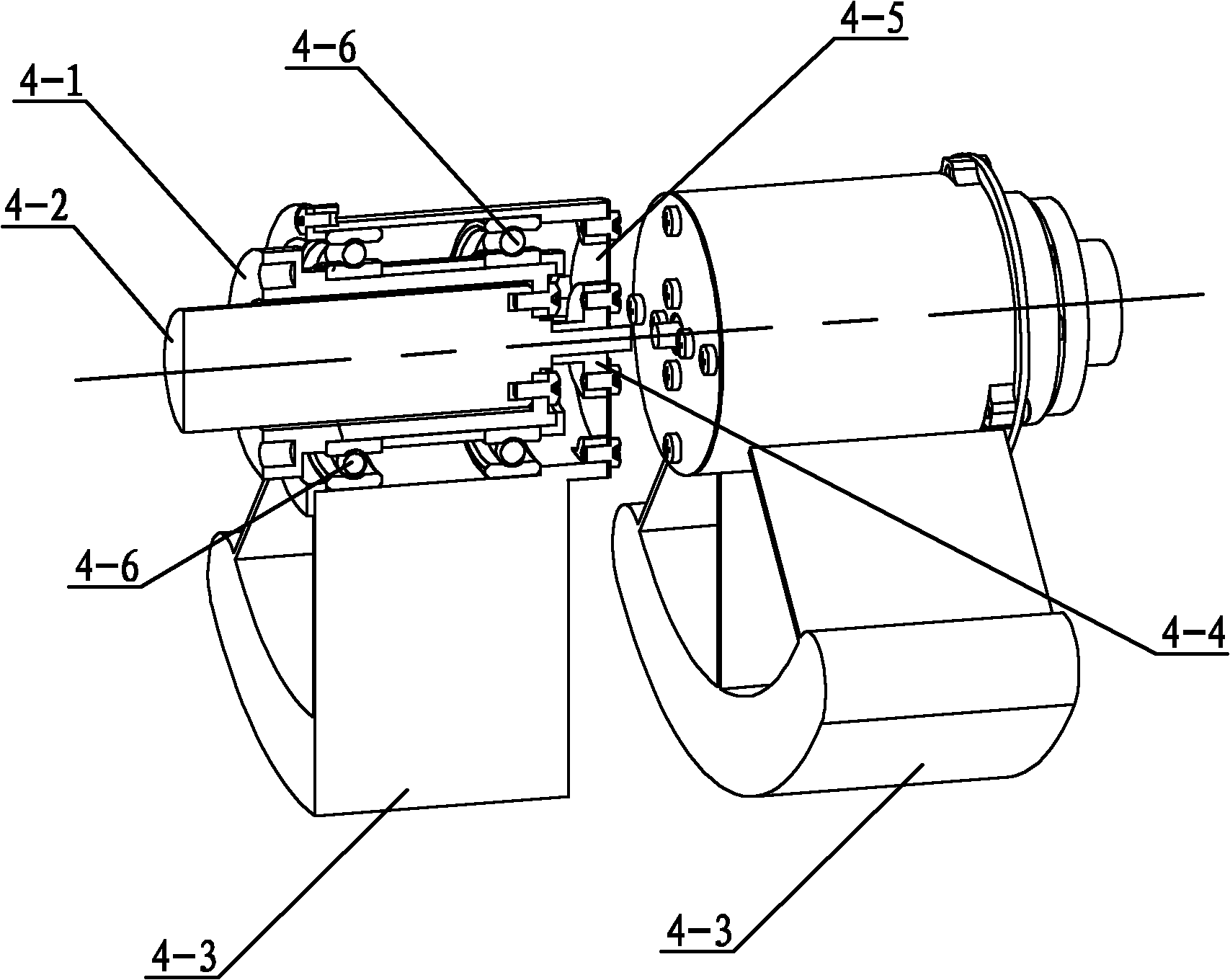
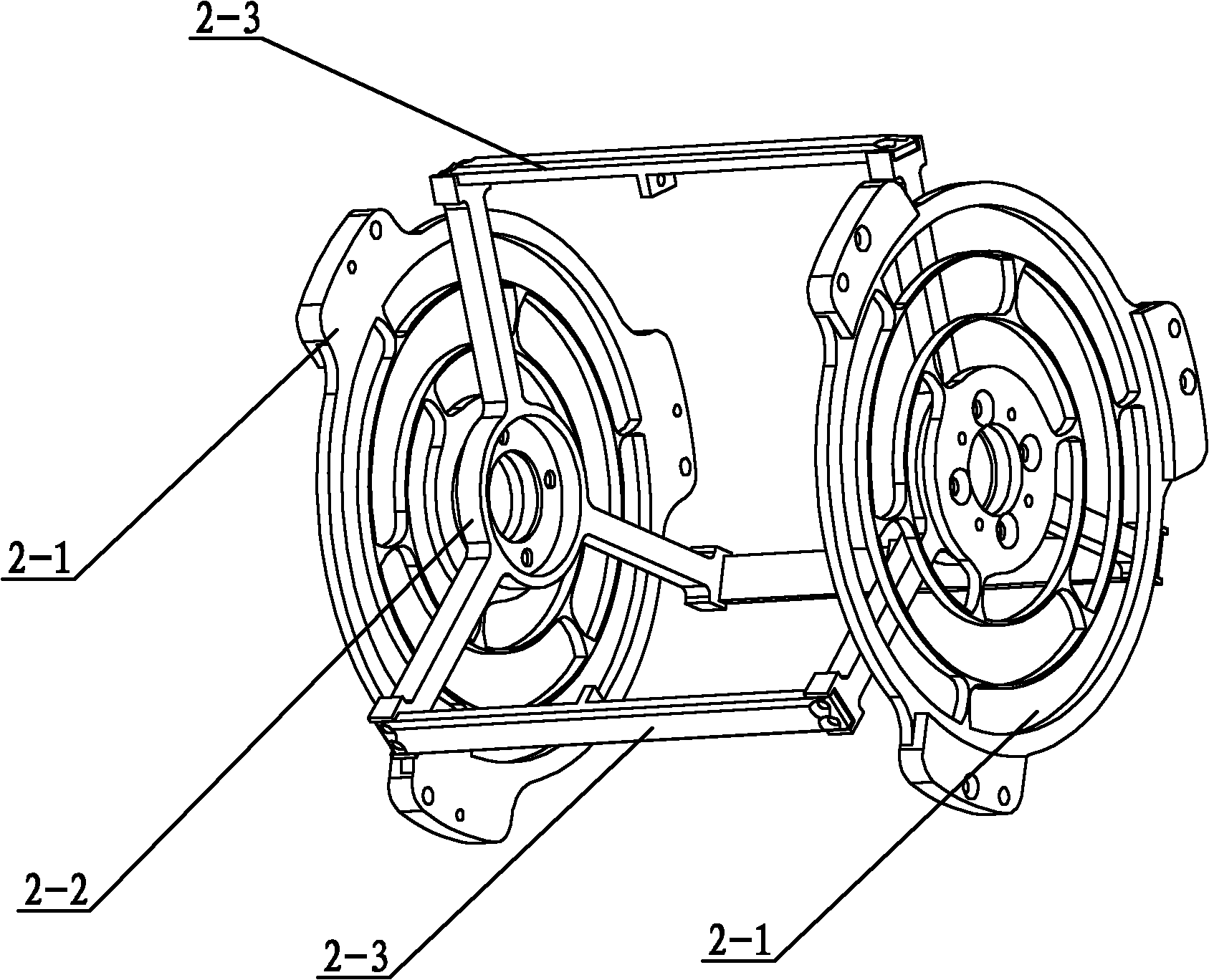
[0009] Specific implementation mode one: combine Figure 1-Figure 4 Describe this embodiment, which includes a spherical housing 1, a sensor module 3, a system controller 5, and a plurality of onboard power supplies 6, and the spherical robot driven by double eccentric masses also includes a support mechanism 2 and two eccentric drive units 4. The support mechanism 2 includes two star brackets 2-2, a support plate 2-4, two support brackets 2-1 and a plurality of connecting rods 2-3, the two star brackets 2-2 are arranged oppositely, and the two The centers of the two star-shaped brackets 2-2 are on the same straight line, and the two star-shaped brackets 2-2 are connected by a plurality of connecting rods 2-3, and each star-shaped bracket 2-2 is provided with a The support bracket 2-1, and the star bracket 2-2 is fixedly connected with the support bracket 2-1, the support plate 2-4 is arranged between the star bracket 2-2, and is connected with the connecting rod 2-3, and mult...
specific Embodiment approach 2
[0012] Specific implementation mode two: combination figure 1 To describe this embodiment, the number of on-board power sources 6 in this embodiment is 3-5. Such setting effectively satisfies the energy required by the robot in the working state. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0013] Specific implementation mode three: combination figure 1 and Figure 4 The present embodiment will be described. The spherical housing 1 of the present embodiment is an ellipsoidal housing. With such a setting, the ellipsoid shell is easy for the operator to observe the current posture of the robot (observing the ground surface through the camera), and limits the lateral rolling of the robot within a certain angle range. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
[0014] The ellipsoid shell of this embodiment, when the robot collides or falls from a height, such a shape is easy for the operator to observe the current posture of the robot; the ellipsoid shell also limits the lateral roll of the robot in a certain angle range, It will not roll sideways when running on slopes.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More