

Hybrid input spatial 3-DOF (degree-of-freedom) parallel mechanism
A technology of mixed input and degrees of freedom, which is applied in the fields of robotics and space mechanics, can solve the problems of large size of the mechanism and sacrifice of flexibility of the mechanism, so as to reduce the motion inertia, improve the processing and assembly accuracy of parts, and reduce the joints of the mechanism. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
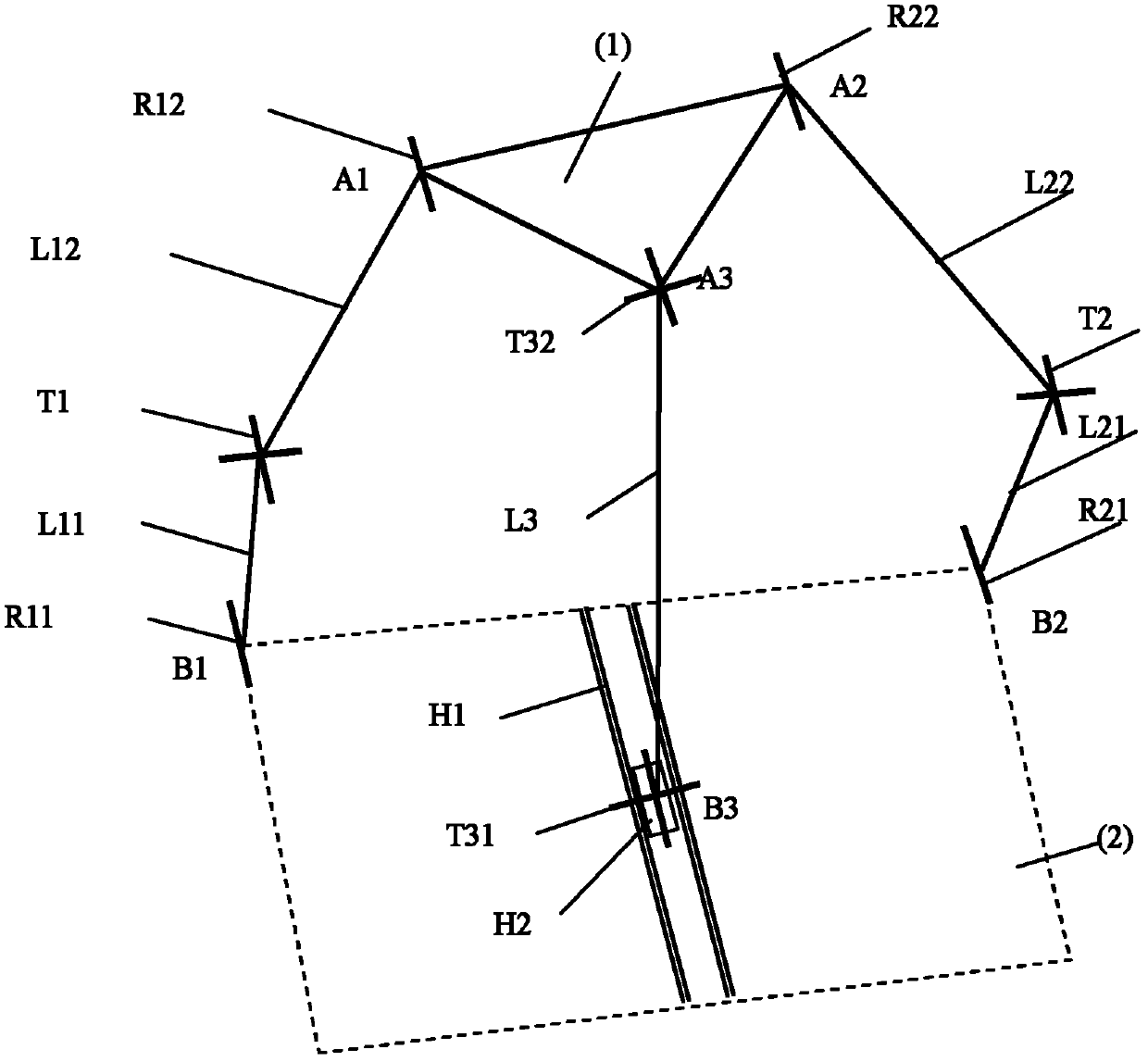
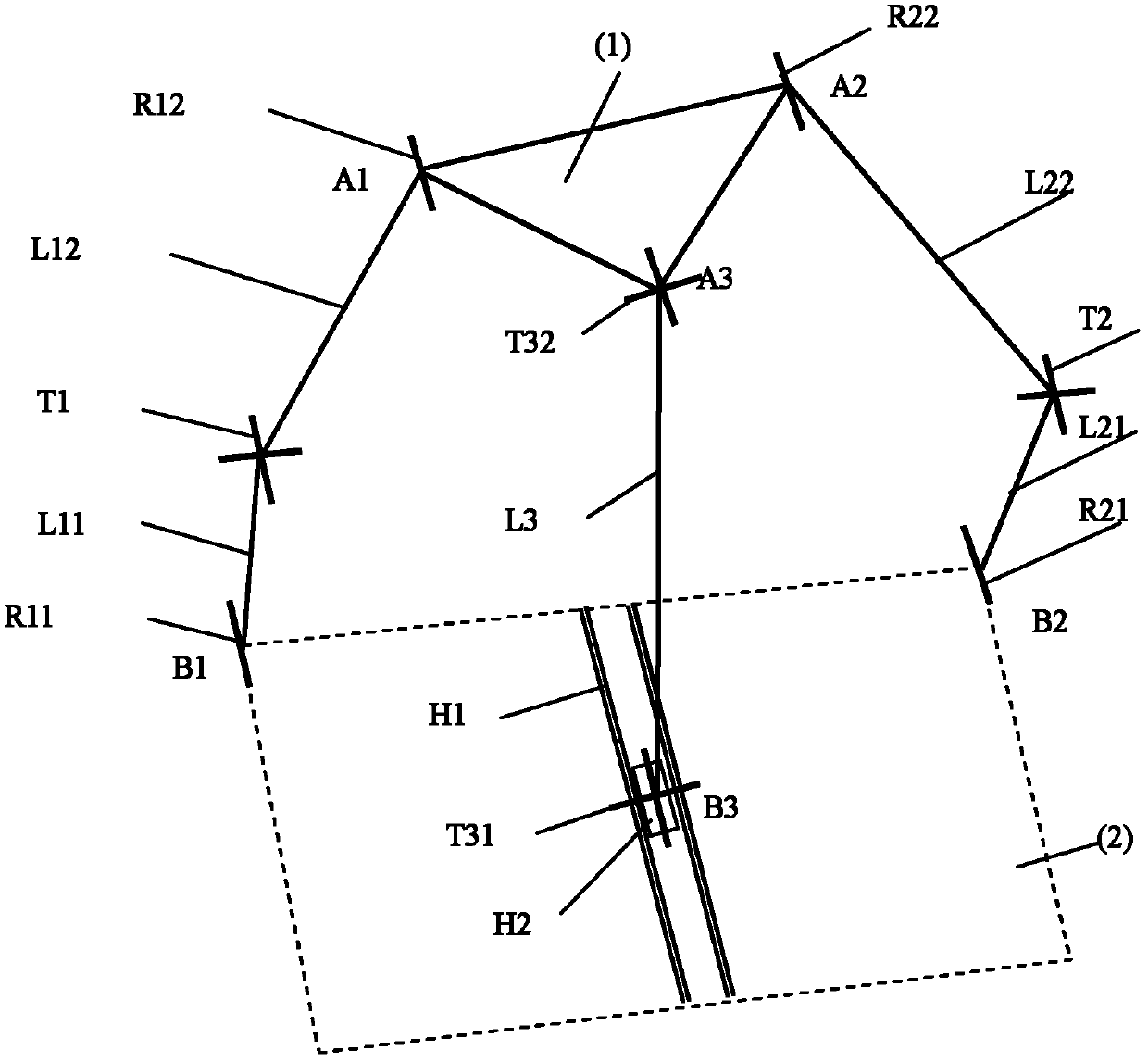
[0018] A space-parallel mechanism with one translation and two rotations is realized by using the driving method of mixed input, and the driving part of the mechanism is completely placed on the fixed platform, which greatly reduces the motion inertia of the whole mechanism. The mechanism is composed of a moving platform 1, a fixed platform 2 and three branch chains A1B1, A2B2, A3B3 connecting the above two platforms; the branch chains A1B1 and A2B2 are composed of rotating hinges R12, R22 and Hooke hinges T1 and T2 respectively from top to bottom. , rotating hinges R11, R21 and connecting rods L11, L12, L21, L22 between them; branch chain A3B3 consists of Hooke hinges T31, T31 from top to bottom, connecting rod L3 between them and sliding pair H2 Composition; of which:
[0019] Said connecting rods L12 and L22 have the same length, they are connected with the moving platform 1 through the rotating hinges R12 and R22 respectively, the connecting rod L3 is connected with the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More