

Spatial accurate straight-line motion mechanism
A linear motion and precise technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of small motion space and volume, complex processing and manufacturing, and high cost, and achieve the effect of large motion range, convenient manufacturing, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Below in conjunction with specific embodiment, and with reference to accompanying drawing, technology of the present invention is described further:
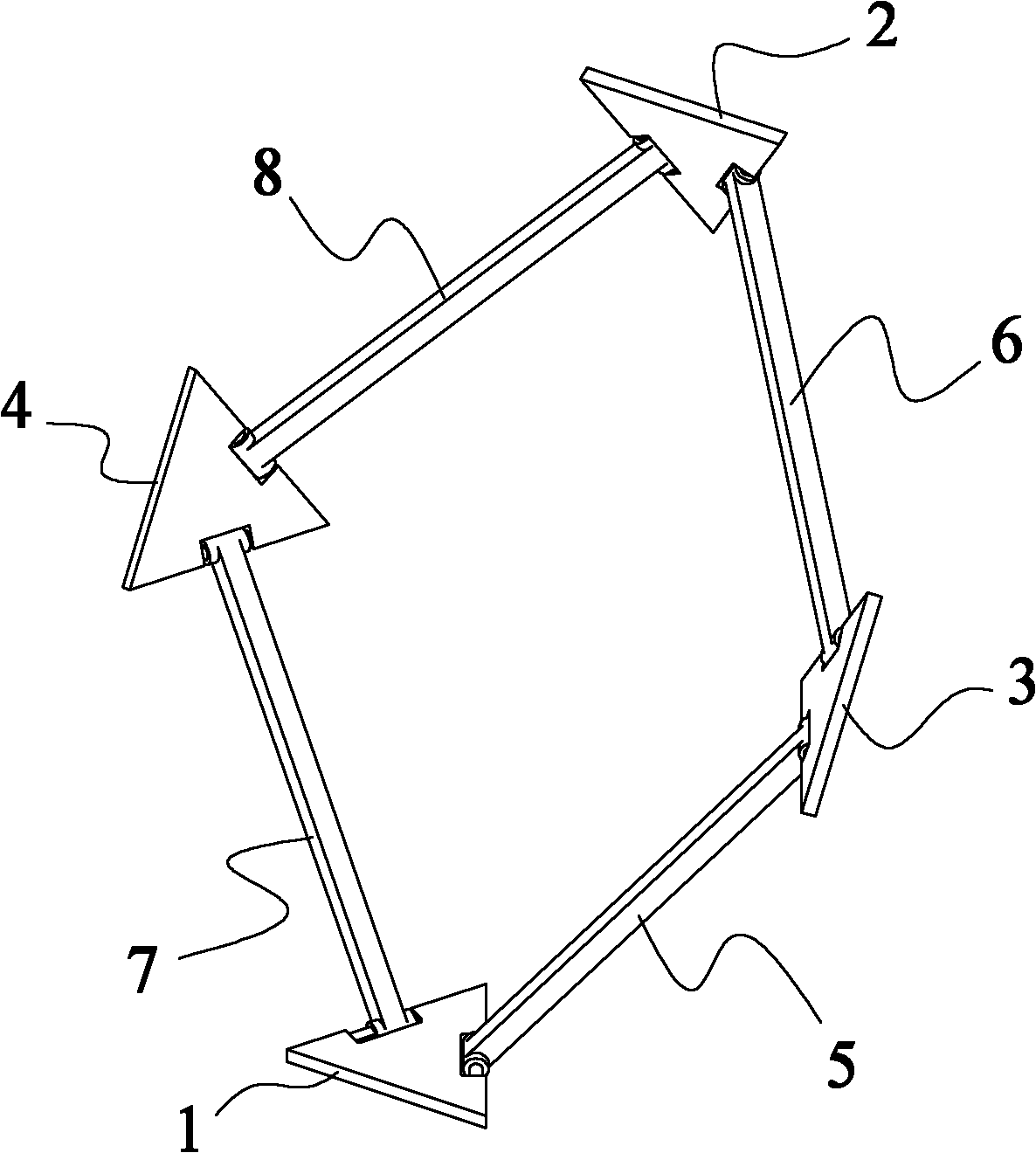
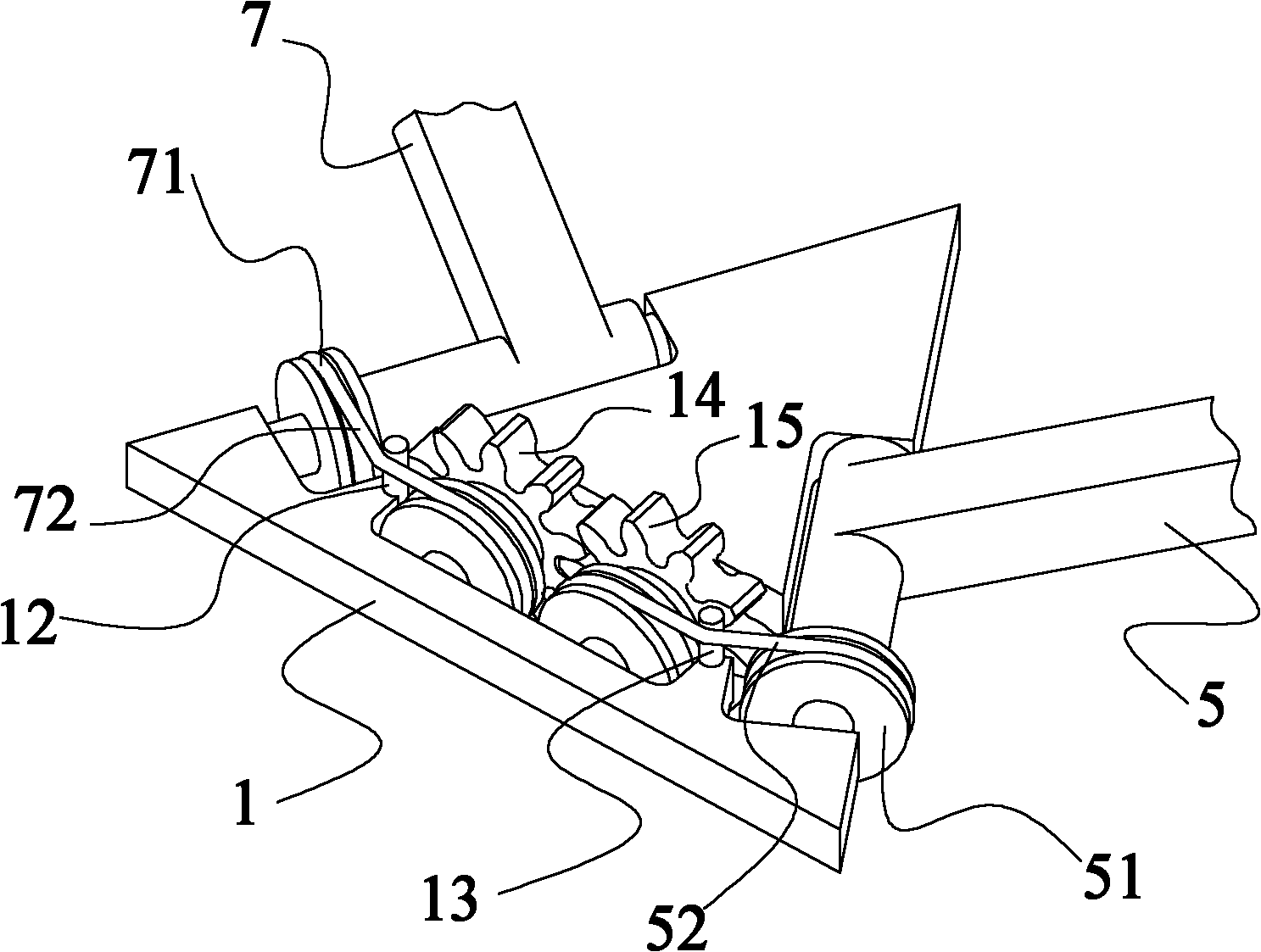
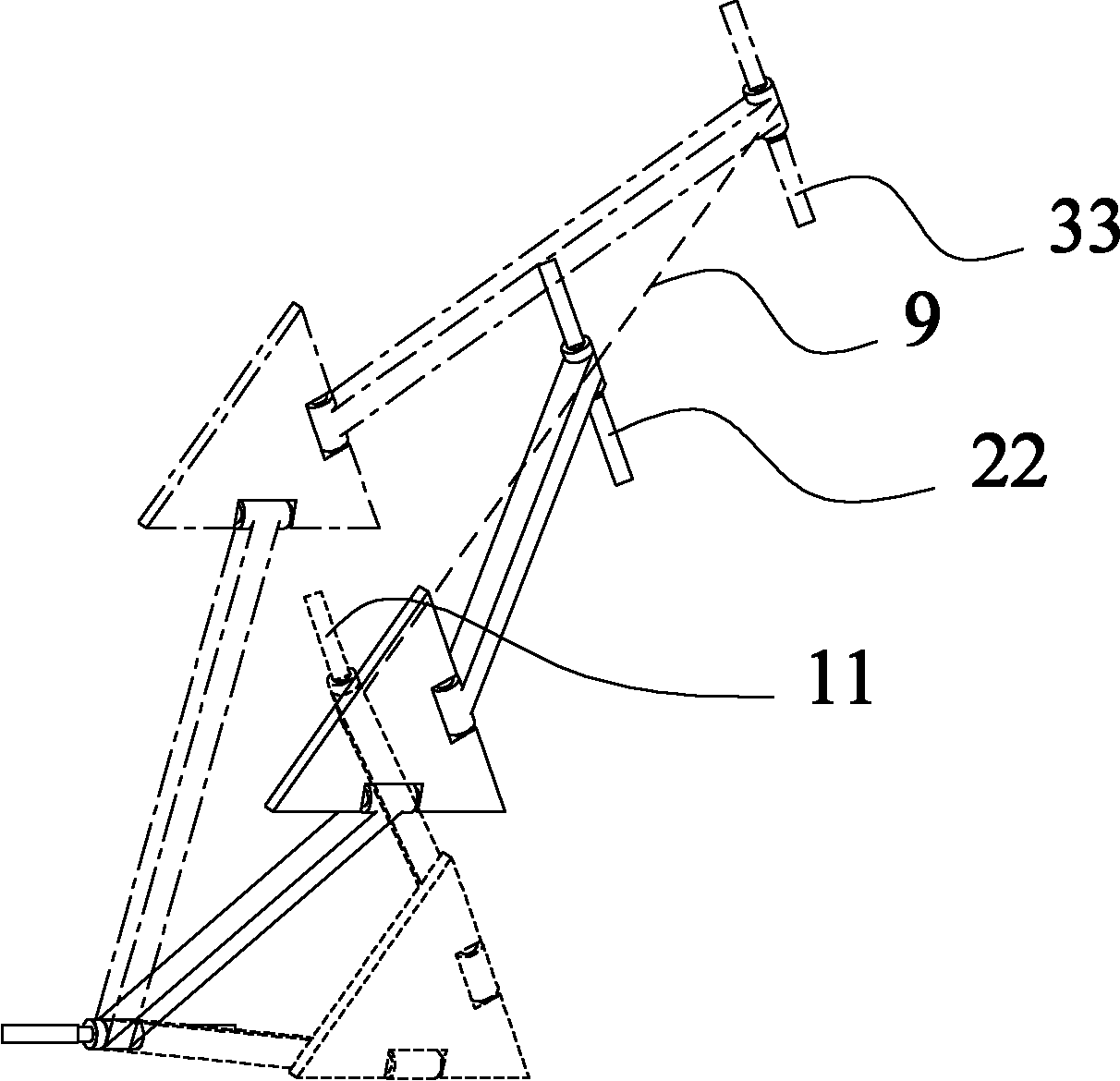
[0018] As shown in the figure, the space-accurate linear motion mechanism of the present invention includes a fixed platform 1 and a mobile platform 2, and it also includes an intermediate platform I3 and an intermediate platform II4. The fixed platform and the intermediate platform II are respectively connected in rotation through a rotary pair The two ends of the left connecting rod I7, the middle platform II and the mobile platform are respectively connected to the two ends of the left connecting rod II8 through the rotation pair, and the described mobile platform and the middle platform I are respectively connected to the right connection through the rotation pair. The two ends of the rod II6, the middle platform I and the fixed platform are respectively connected to the two ends of the right connecting rod I5 through ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More