

Cable-controlled upper limb functional training robotic arm
A technology of mechanical arms and upper limbs, applied in passive exercise equipment, physical therapy, etc., can solve the problems of reducing product application efficiency, patient noise, and unsightly appearance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
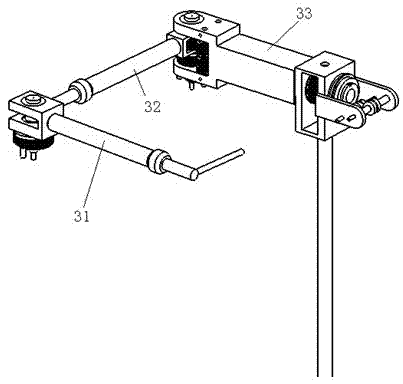
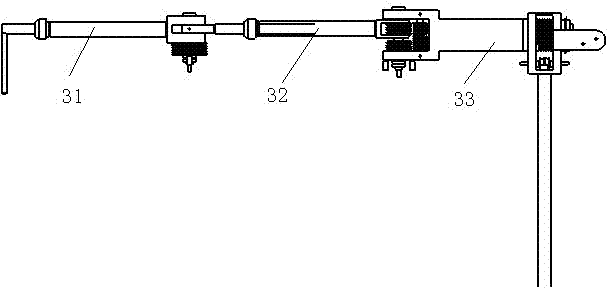
[0020] Such as figure 1 , shown in 2, the cable-controlled type upper limb functional training mechanical arm of the present invention comprises an elbow joint 31, a shoulder joint 32, a main rod 33, a motor, a steel wire rope, an elbow joint U-shaped device 4, a shoulder joint U-shaped device 12, and a shoulder blade 14, the main rod frame 22 and so on.
[0021] The elbow joint 31 is rotationally connected with the shoulder joint 32 through the elbow joint U-shaped device 4 , and the shoulder joint 32 is rotationally connected with the main rod 33 through the shoulder joint U-shaped device 12 and the shoulder blade device 14 .
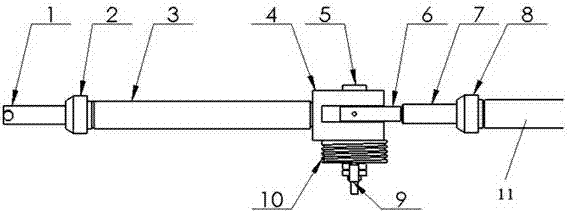
[0022] Such as image 3 As shown, the elbow joint 31 includes a forearm rod 1, a nut 2, and a forearm barrel 3. The forearm rod 1 and the forearm barrel 3 are in the form of a sleeve, which can be adjusted in length and fixed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More