

Underactuated Auv adaptive trajectory tracking control device and control method
A technology of trajectory tracking and control device, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large energy consumption of the system, not considering the uncertainty of model parameters, and high cost of the propeller, and achieve the guarantee The effect of reliable operation, reduced energy consumption and improved propulsion efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in detail below:
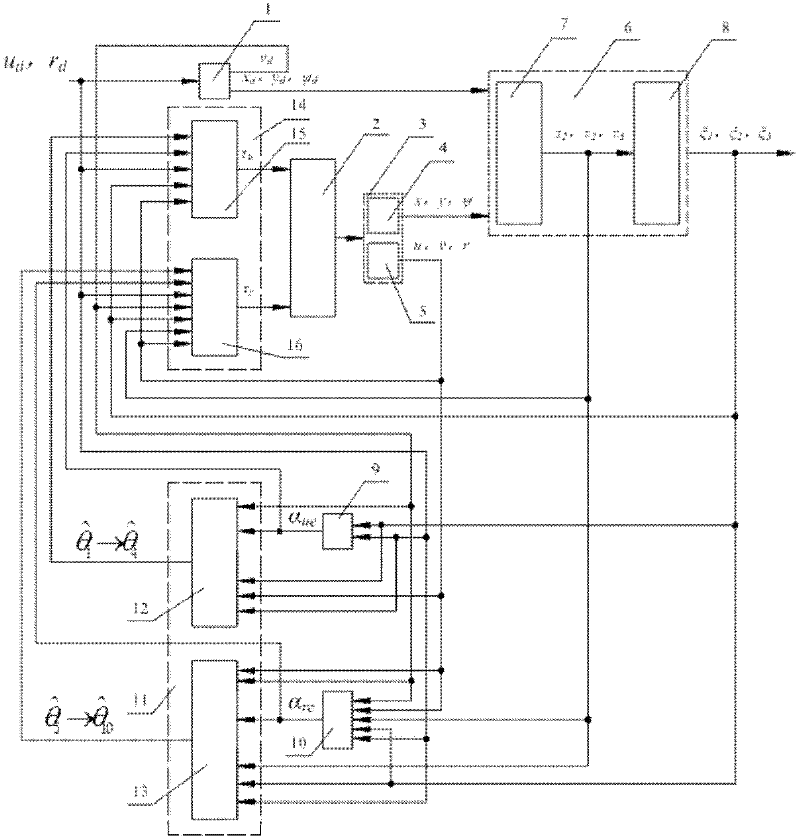
[0028] figure 1 The composition of the underactuated AUV adaptive trajectory tracking control device of the present invention is given.
[0029] exist figure 1 The devices represented by each number in the figure are as follows: 1-reference path generator; 2-underwater robot AUV; 3-measurement element; 4-position, angle sensor; 5-linear velocity, angular velocity sensor; 6-diffeomorphic converter; 7-Earth coordinates to hull coordinates converter; 8-underactuated term compensator; 9-linear velocity virtual controller; 10-angular velocity virtual controller; 11-parameter estimator; 12-parameter θ 1 → theta 4 Estimated value; 13 - parameter θ 5 → theta 10 Estimated value; 14-controller; 15-longitudinal thrust controller; 16-turning bow moment controller.
[0030] combine figure 1 , the underactuated AUV adaptive trajectory tracking control device of the present invention includes a reference path generator 1, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More