

Wearable exoskeleton lower limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of medical rehabilitation systems, can solve the problems of large auxiliary accessories and lack of portability, and achieve the effects of good portability, weight reduction and patient burden reduction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
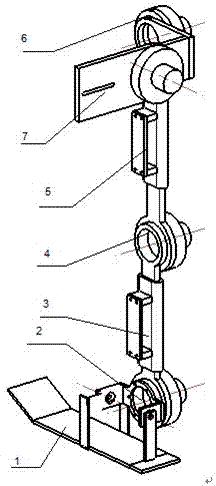
[0035] Such as figure 1As shown, the exoskeleton wearable lower limb rehabilitation robot includes: foot exoskeleton 1; ankle exoskeleton 2; calf exoskeleton 3; knee joint exoskeleton 4; thigh exoskeleton 5; hip joint exoskeleton 6; bones7. Among them, the foot exoskeleton 1 is directly worn on the patient's foot; the ankle exoskeleton 2 is connected to the foot exoskeleton 1, which can drive the degree of freedom of ankle joint flexion and extension, and release the degree of freedom of ankle abduction; the calf exoskeleton 3 is connected to the ankle joint. The joint exoskeleton 2 is connected, and the length can be adjusted steplessly by adjusting screws, and is bound to the patient's lower leg; the knee joint exoskeleton 4 is connected to the lower leg exoskeleton 3, which can drive the patient's knee joint to flex and extend; the thigh exoskeleton 5 is connected to the knee joint exoskeleton The bone 4 is connected, and the length can be adjusted steplessly by adjusting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More