

Wearable high-precision data acquisition upper limb exoskeleton
A data acquisition, high-precision technology, applied in medical science, prosthesis, etc., can solve problems such as high work intensity and difficulty in meeting patient requirements, and achieve the effect of compact structure, light weight, and high rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Further illustrate the present invention below in conjunction with accompanying drawing.
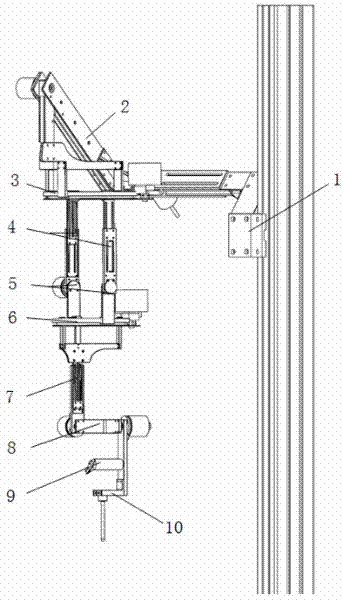
[0026] refer to figure 1 , the wearable high-precision data acquisition upper extremity exoskeleton includes an adjustable base 1, a shoulder rotation sub-mechanism 2, a shoulder slip ring mechanism 3, an upper arm link length sliding adjustment mechanism 4, and an elbow parallel rotation sub-mechanism in series. 5. Elbow slip ring mechanism 6, lower arm link length sliding adjustment mechanism 7, wrist rotation sub-mechanism 8, terminal operating handle 9 and tool clamping device 10; Shoulder adduction / abduction, flexion / extension, internal rotation / external rotation of the upper limbs, elbow flexion / extension, internal rotation / external rotation and wrist flexion / extension, adduction / abduction correspond;
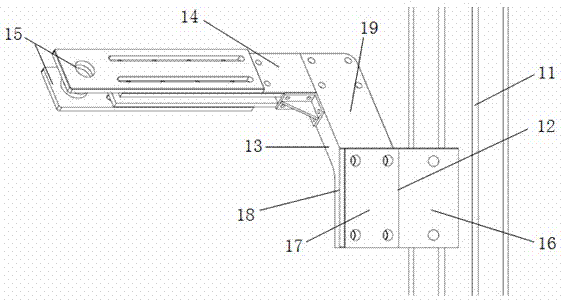
[0027] refer to figure 2 , the adjustable base 1 includes a column 11, a first attitude adjustment member 12, a second attitude adjustment member 13, a horizontal directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More