

Flexible gripping device
A grasping device and flexible technology, applied in the field of grasping devices, can solve problems such as the inability to automatically align the center position of the workpiece to be picked and placed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The flexible grasping device of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
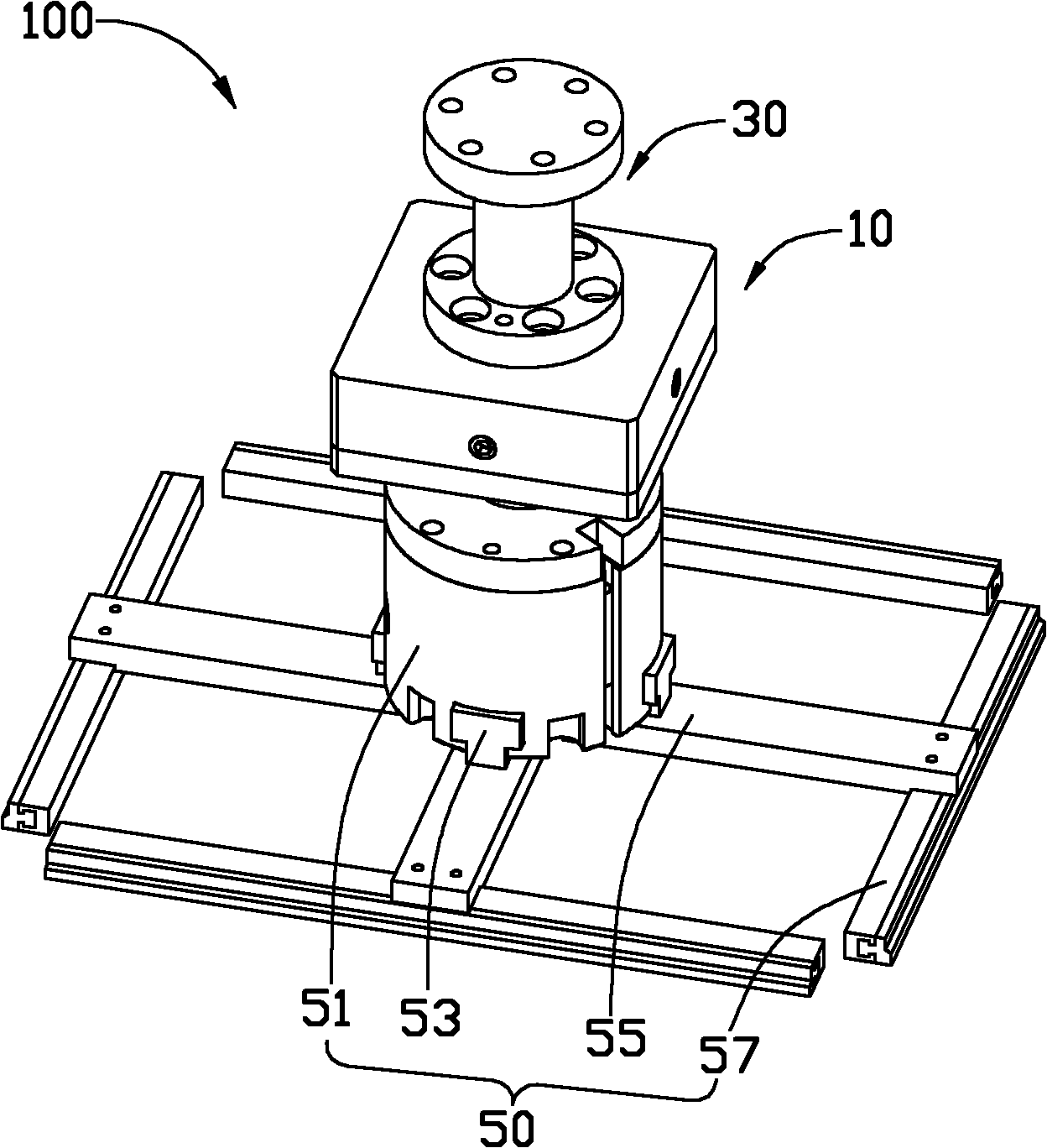
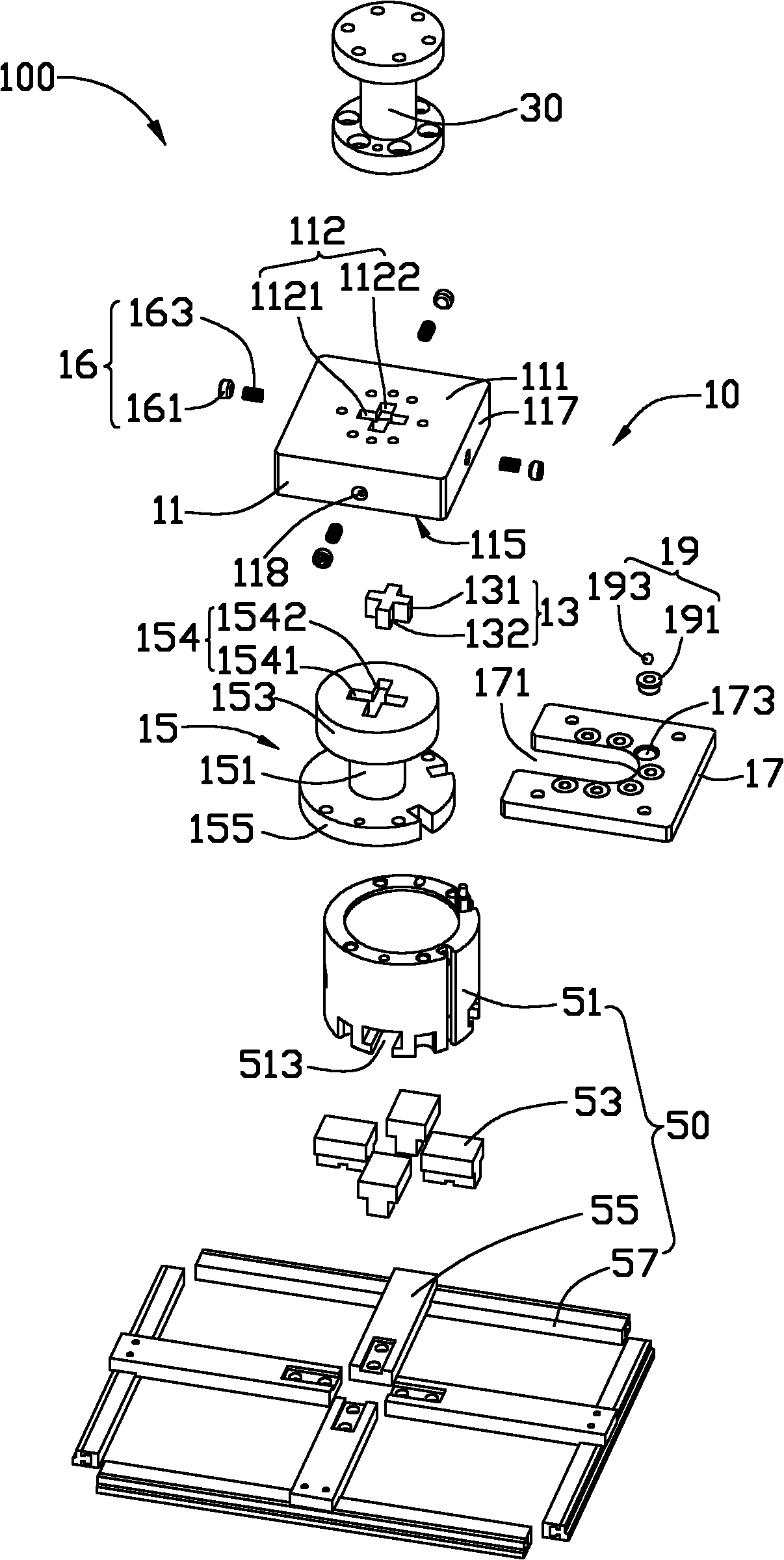
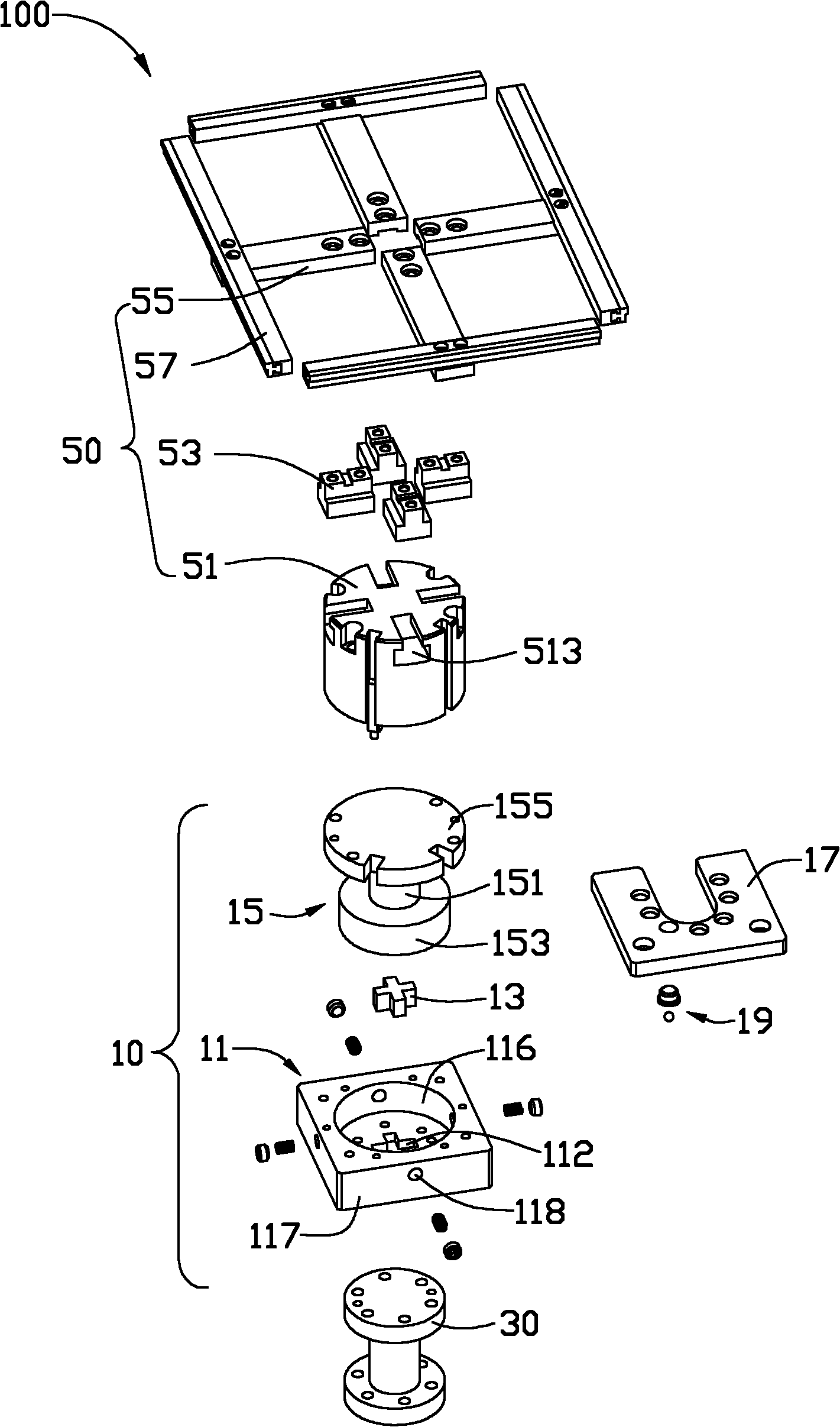
[0014] see figure 1 , The flexible grabbing device 100 includes a flexible mechanism 10, a connecting piece 30 and a gripper assembly 50. One end of the connecting piece 30 is affixed to the flexible mechanism 10, and the other end is used for affixing to the mechanical arm of the robot or the drive shaft of the driving device. The jaw assembly 50 is fixedly connected to the other end of the flexible mechanism 10 relative to the connecting member 30 for grabbing a workpiece (not shown).
[0015] Please also refer to figure 2 and image 3 , The flexible mechanism 10 includes a flexible seat 11 , a sliding block 13 , a sliding shaft 15 , an adjusting component 16 , a fixing plate 17 and a lubricating component 19 . The flexible seat 11 is substantially rectangular plate-shaped, including a top surface...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More