

Model-based hysteresis feed-forward correction method of piezoelectric ceramic scanner
A piezoelectric ceramics and calibration method technology, applied in scanning probe technology, instruments, electrical digital data processing and other directions, can solve the problems of low model accuracy, poor versatility, inability to obtain analytical inverse solutions, etc., to achieve good versatility, Accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The piezoelectric ceramic scanner hysteresis feedforward correction method of the present invention comprises the following steps:
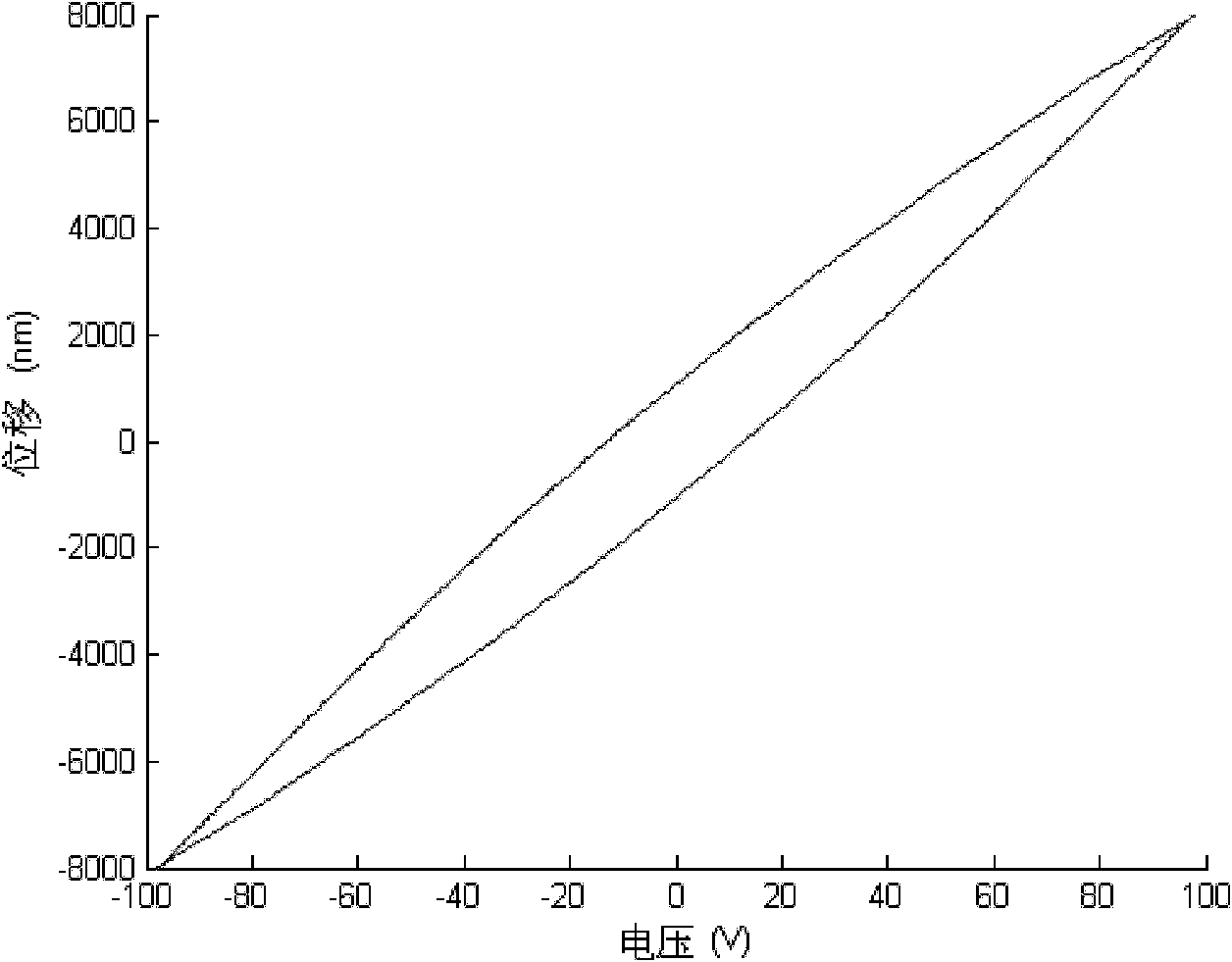
[0030] Using a capacitive displacement sensor to measure the response data of a piezoceramic scanner under a linear input voltage;
[0031] Establish a mathematical model for the hysteresis of piezoelectric ceramic scanners;
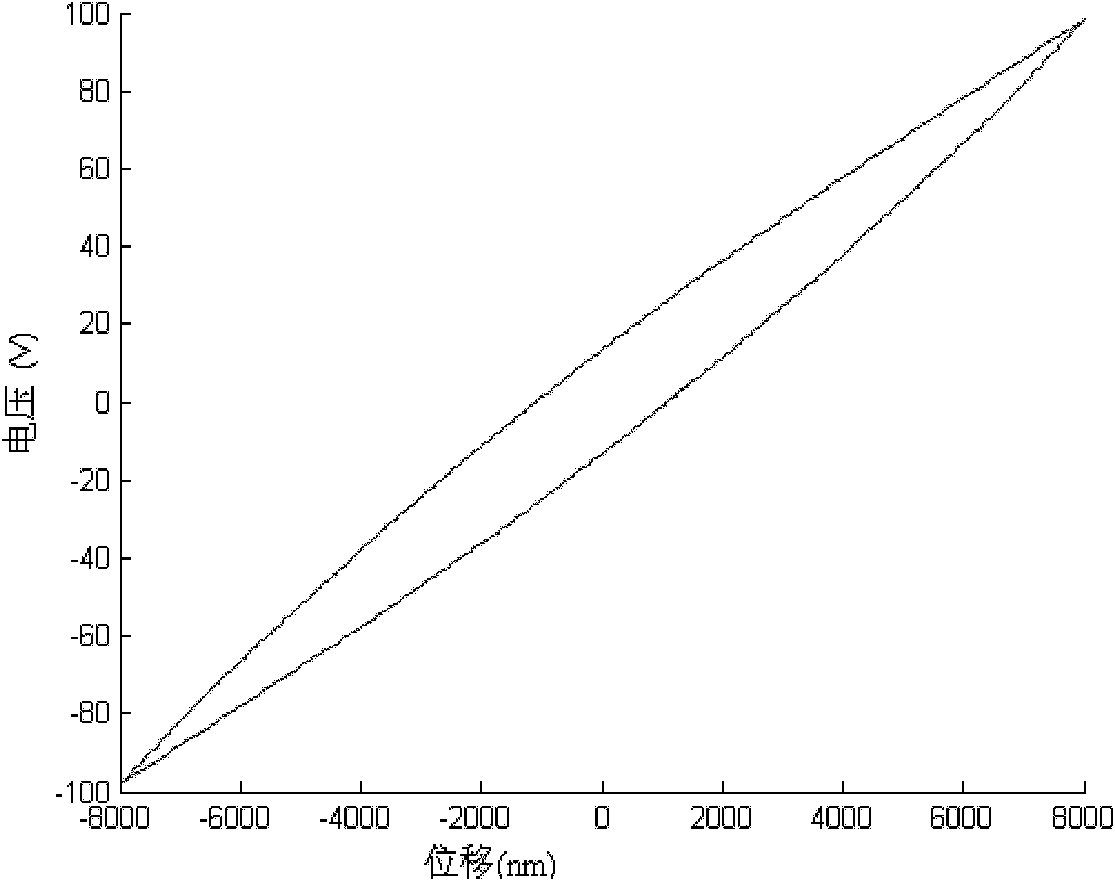
[0032] Recognizing the parameters of the mathematical model according to the response data obtained from the above measurement, obtaining the parameters of the inverse model according to the parameters of the mathematical model, and establishing the inverse model;
[0033] The output of the inverse model is used as the input of the piezoelectric ceramic scanner, and the piezoelectric ceramic scanner is linearized to complete the hysteresis feed-forward correction of the piezoelectric ceramic scanner.
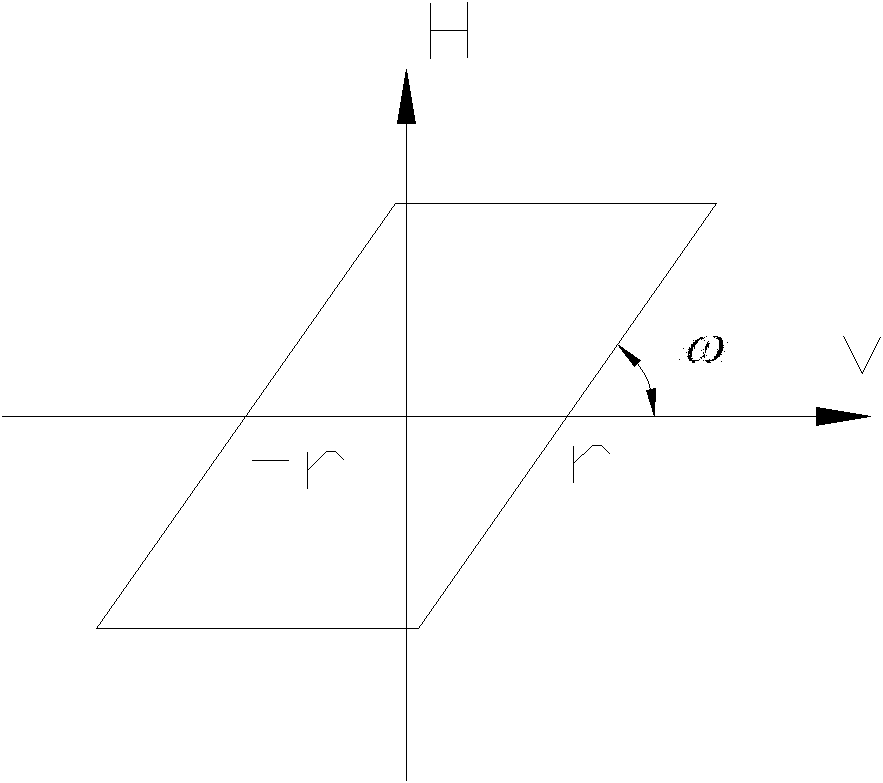
[0034] Using the Prandtl-Ishlinskii model to establish the following mathematical model for the hysteresis of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More