

Method for correcting position during the glass grabbing process of manipulator of manipulator glass stacking system
A calibration method and manipulator technology, which are applied in the stacking of objects, destacking, transportation and packaging of objects, etc., can solve the problems of short service life, high cost, deviation speed of the roller table, etc., and achieve long service life and maintenance. Convenient and low-cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
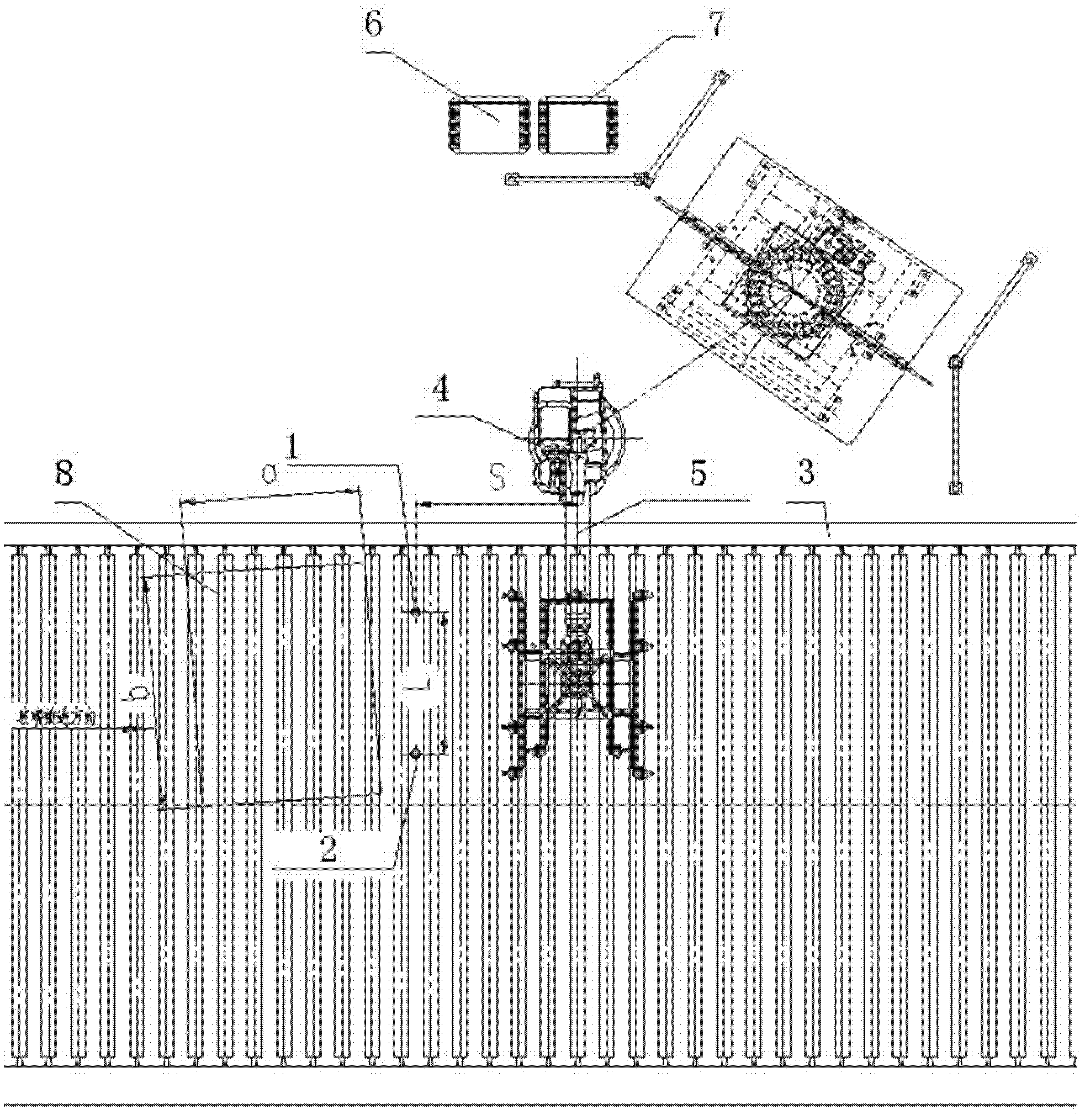
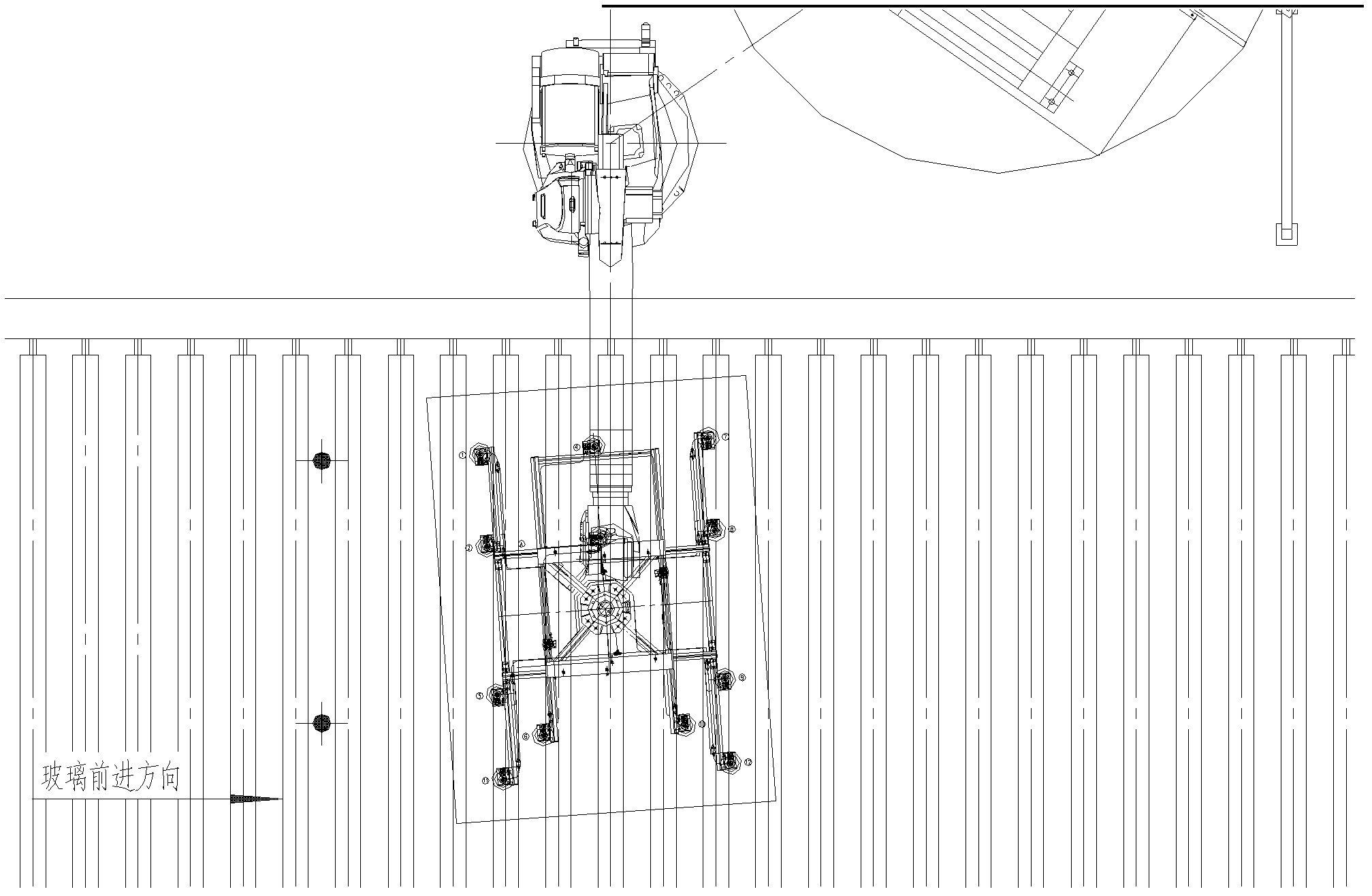
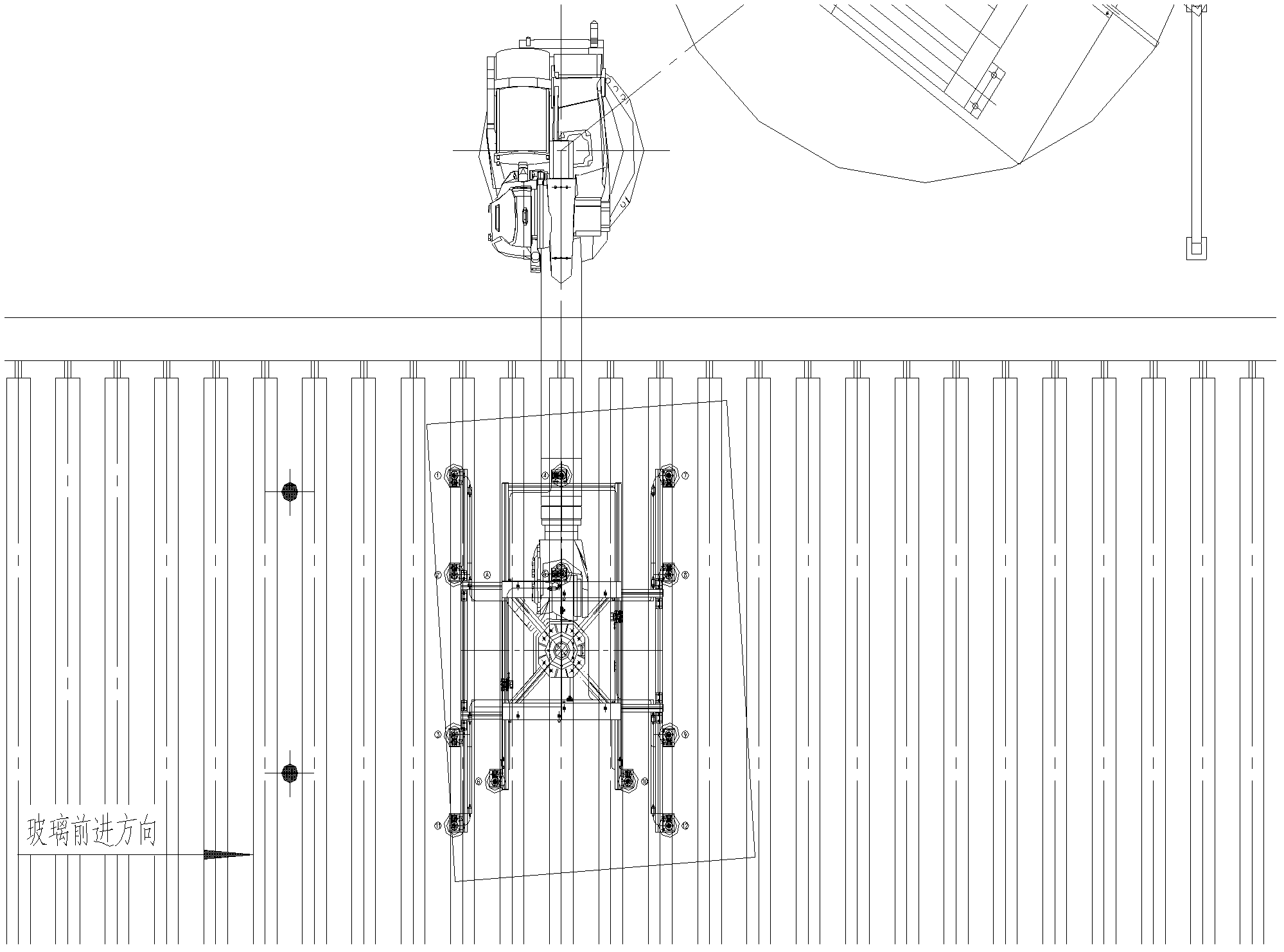
[0013] The invention is described in further detail below in conjunction with the accompanying drawings. This manufacturing technology is clear to those in the field.
[0014] Such as figure 1 , figure 2 with image 3 As shown, the photoelectric sensor I and the photoelectric sensor II are installed at the upstream S of the manipulator center. The distance between the two photoelectric sensors is L (1.5m, the specific size can be adjusted according to the actual situation), and the photoelectric sensor is connected to the control cabinet (PLC) of the manipulator. When the glass passes the photoelectric sensor: the photoelectric sensor senses the edge of the glass and sends out a signal. The size of the glass is axb (length x width). The photoelectric sensor signal is connected to the control system, and the deflection value and the grabbing time point are processed by the PLC and provided to the manipulator control system.
[0015] The deflection angle, when the glass is skewed,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More