Multi-degree-of-freedom underactuated manipulator
An underactuated, degree-of-freedom technology, applied in the field of manipulators, can solve problems such as high dexterity, complex control, and many degrees of freedom, and achieve the effect of many degrees of freedom, simple transmission mechanism, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
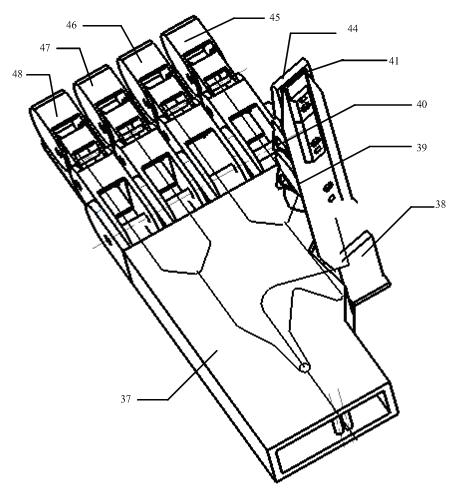
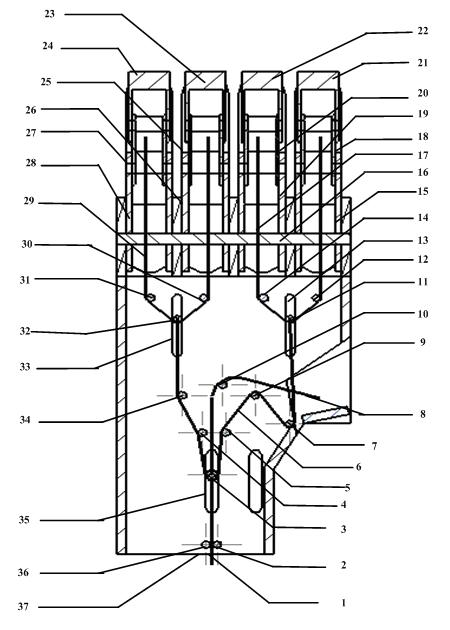
[0012] Embodiment one: see Figure 1-5 , the multi-degree-of-freedom underactuated manipulator, including the palm (37), thumb (44), index finger (45), middle finger (46), ring finger (47), little finger (48), guide wheel (2, 3, 4, 5, 7, 9, 10, 11, 12, 14, 30, 31, 32, 34, 36), driving tendons (1, 6, 8, 11, 29), characterized in that: the index finger (45), The middle finger (46), ring finger (47) and little finger (48) are hinged with the palm (37) through the shaft (16), and can rotate around the shaft (16). Each finger consists of 3 knuckles, the thumb (44) includes the proximal knuckle (39), the middle knuckle (40), and the distal knuckle (41), the index finger (45) includes the knuckle (15), the middle knuckle knuckle (18), far index knuckle (21), middle finger (46) including near and middle knuckles (19), middle and middle knuckles (20), far and middle knuckles (22), ring finger (47) including near ring knuckles (26), The middle ring finger (25), the far ring finger (23...
Embodiment 2
[0013] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0014] The layout of the rope guide wheels inside the palm is based on the fact that the force driving the thumb is relatively large. In the absence of friction, the force on tendon C (8) is equal to the driving force of the motor, and the force on tendon B (6) is Half of the driving force, the force on tendons D, E (11,29) is half that on tendon B (6). The first, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 guide wheels (2, 3, 4, 5, 7, 9, 10, 11, 12, 14, 30, 31, 32, 34, 36) There is a small groove on the outside of the middle, which can make the tendon better connect with the sheave. The shape of the palm (37) is a hollow box without a cover, and there are chutes (13, 33, 36) at the bottom of the palm for the 8th, 13, 2 guide pulleys (11, 32, 3), and the stroke of the chute is at Between 20-35mm, similar to the length of human knuckles, sliding in between...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com