

Genetic algorithm-based method for identifying parameters of mechanical arm with unknown load
A genetic algorithm and parameter identification technology, which is applied in the field of parameter identification of manipulators with unknown loads based on genetic algorithms, can solve problems such as affecting the intelligence level of robots and less research work, and achieve the effect of easy implementation and good universality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the object, technical solution and advantages of the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
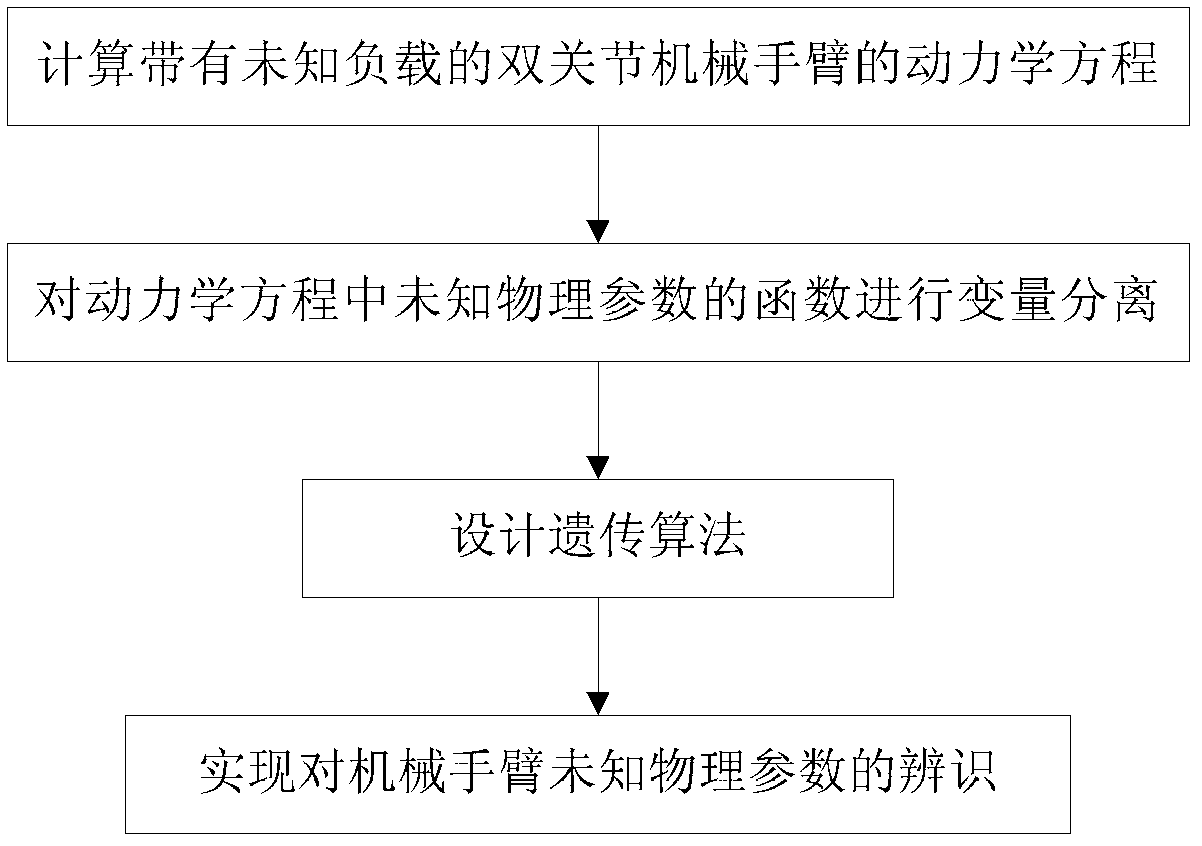
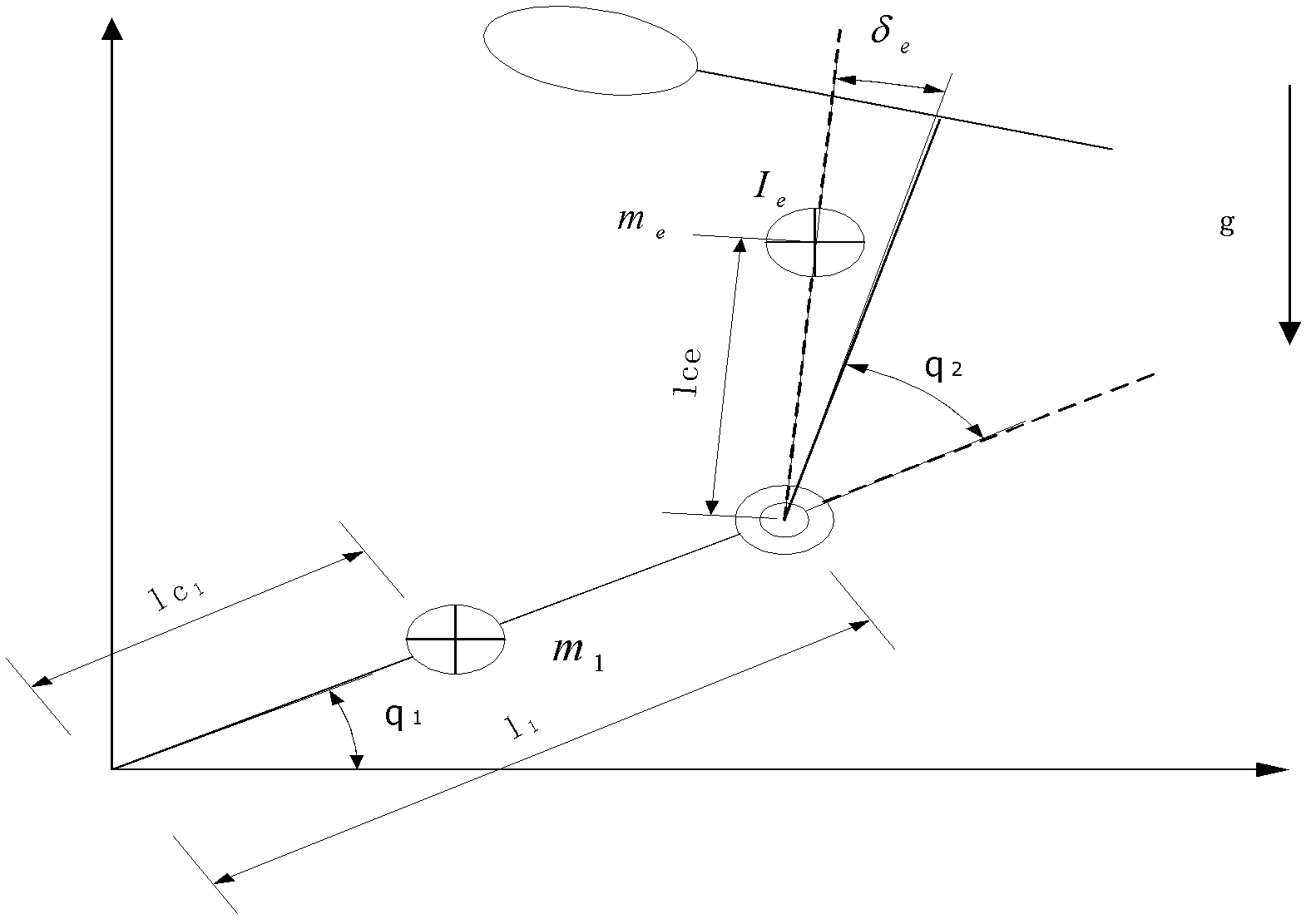
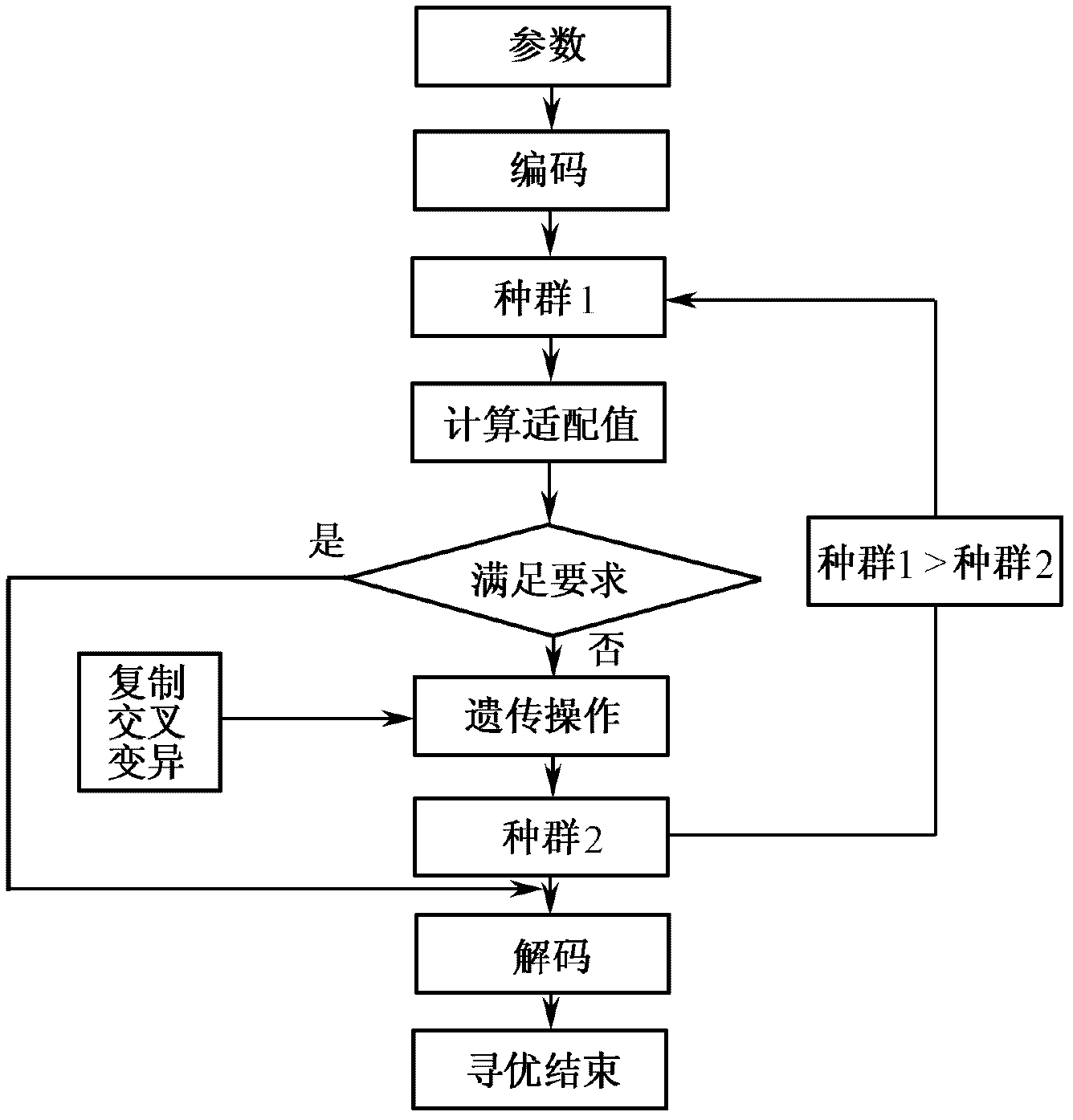
[0037] See Figure 1-Figure 5 , the basic idea of the present invention is to obtain its dynamic equation according to the dynamic characteristics of the double-joint mechanical arm with unknown load; Separation of variables to obtain the expression after the function of the unknown physical parameter is separated; according to the expression of the function of the unknown physical parameter after the separation, design a genetic algorithm to identify the parameters of the double-joint robotic arm with an unknown load; through MATLAB The identification value obtained by simulation is compared with the measured value to realize the identification of the physical parameters of the double-joint manipulator with unknown load.
[0038] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More