

Video monitoring method and system
A video surveillance system and video surveillance technology, applied in closed-circuit television systems, image data processing, instruments, etc., can solve problems such as increasing the amount of calculation, and achieve the effect of reducing false negatives and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
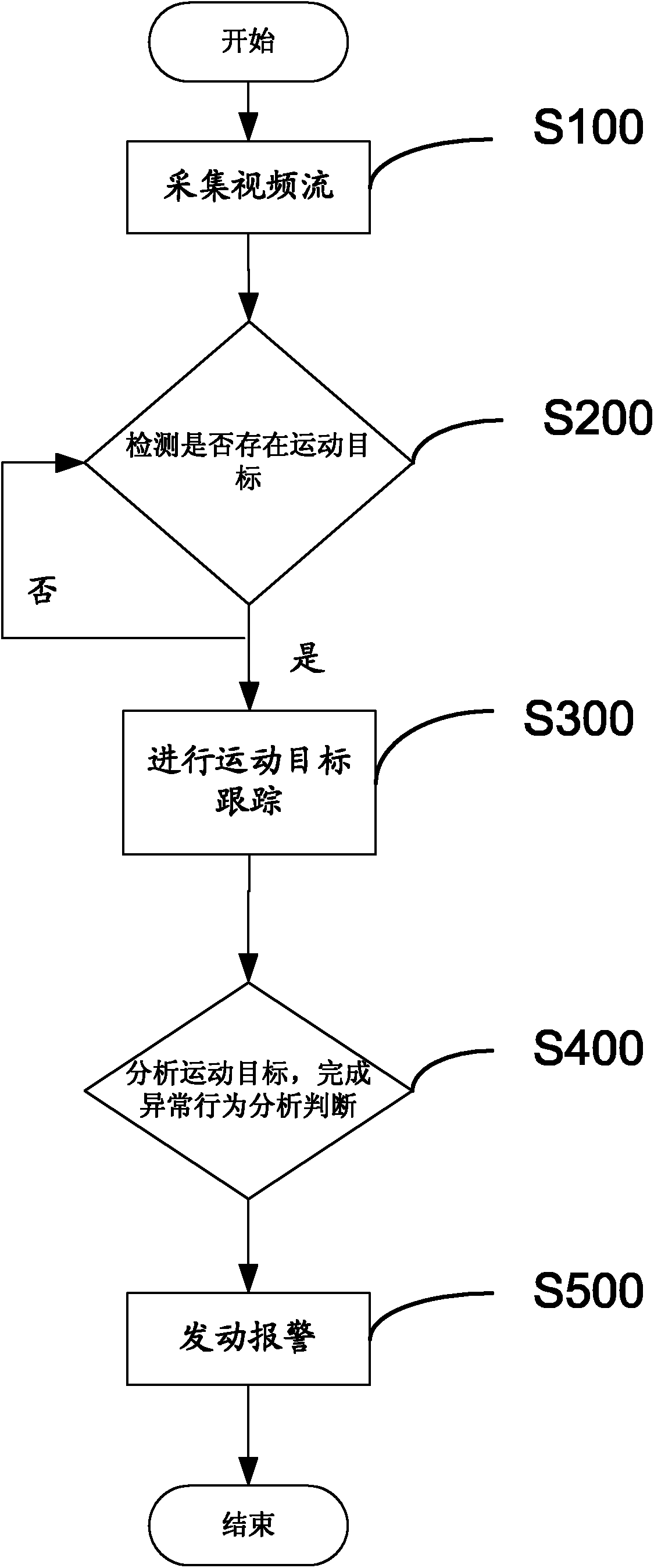
[0023] see figure 1 , a kind of video surveillance method that the present invention provides is characterized in that, comprises the following steps:
[0024] S100: Collect a video stream that needs to be analyzed currently; specifically, the video stream includes a network video stream provided by a hard disk video recorder, a video stream provided by a video capture card, and a file video stream.
[0025] S200: Detect whether there is a moving target in the video stream, analyze the image information of the collected video stream, if there is a moving target, perform adaptive background modeling, initially obtain the foreground, perform morphological processing on the foreground, and fill the target area And reduce the small fragment a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More