

Device for estimating turning characteristic of vehicle
A technology of turning characteristics and vehicles, which is applied in the field of estimating devices of turning characteristics of vehicles, and can solve the problems that the estimation of stability coefficient is susceptible to detection errors and it is difficult to improve the estimation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach
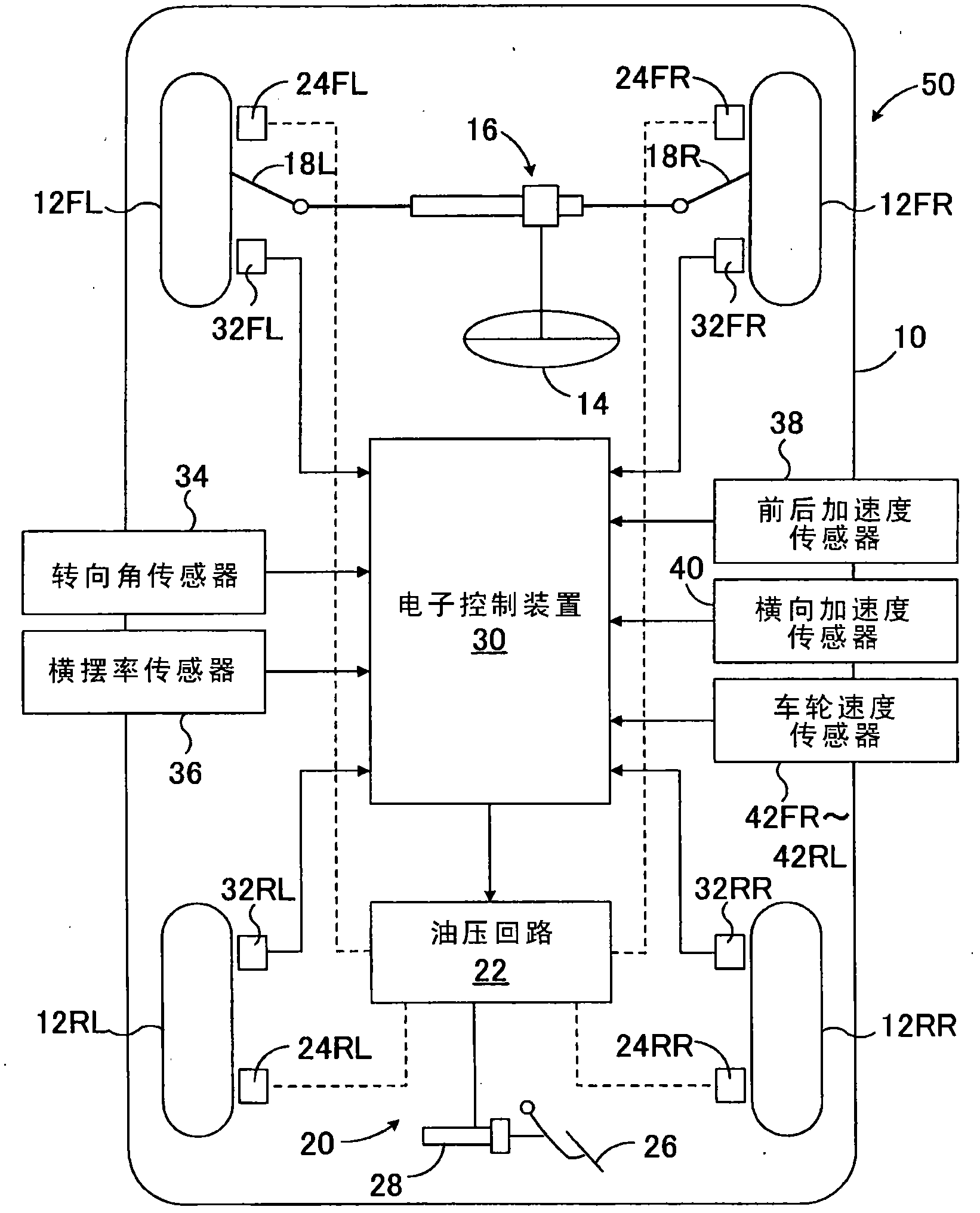
[0109] figure 1 is a schematic configuration diagram showing a first embodiment of a turning characteristic estimating device according to the present invention applied to a motion control device of a vehicle.
[0110] exist figure 1 In , reference numeral 50 shows the entire motion control device of the vehicle 10 , and the turning characteristic estimating device according to the present invention constitutes a part of the motion control device 50 . The vehicle 10 has left and right front wheels 12FL and 12FR and left and right rear wheels 12RL and 12RR. Left and right front wheels 12FL and 12FR serving as steered wheels are steered by a rack and pinion power steering device 16 driven in response to steering of a steering wheel 14 by a driver via tie rods 18L and 18R.
[0111] Brake pressures of wheel cylinders 24FR, 24FL, 24RR, and 24RL are controlled by hydraulic circuit 22 of brake device 20, thereby controlling the braking force of each wheel. It is not shown in the...
no. 2 approach
[0177] Figure 4 It is a flowchart showing the main part of the estimation calculation routine of the stability coefficient Kh in the second embodiment of the turning characteristic estimating device according to the present invention configured as a modified example of the first embodiment. In addition, in Figure 4 in, for with figure 2 The steps shown correspond to the steps, labeled with the figure 2 The same step numbers as the step numbers marked in , are also the same for flowcharts of other embodiments described later.
[0178] In this second embodiment, after step 80 is completed, in step 82 , the number of reciprocating steering performed by the driver per unit time is calculated as the steering frequency fs. In addition, based on the steering frequency fs and according to the Figure 5The cut-off frequency fhc is calculated by using the corresponding map shown in the graph, so that the lower the steering frequency fs is, the smaller the cut-off frequency fhc o...
no. 3 approach
[0184] Figure 6 It is a flowchart showing the main part of the estimation calculation routine of the stability coefficient Kh in the third embodiment of the turning characteristic estimating device according to the present invention constituted as a modified example of the first embodiment.
[0185] In the third embodiment, after step 80 is completed, in step 84 , the number of reciprocating steering performed by the driver per unit time is calculated as the steering frequency fs. In addition, based on the absolute value of the steering frequency fs and the front-rear acceleration Gx of the vehicle and according to the Figure 7 The cut-off frequency fhc is calculated from the map corresponding to the graph shown, so that the lower the steering frequency fs is, the smaller the cut-off frequency fhc of the high-pass filter processing is, and the greater the absolute value of the front-rear acceleration Gx of the vehicle is, the higher the cut-off frequency fhc of the high-pass...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More