

Driving method and system of four-rotor-wing unmanned flight vehicle
A technology of unmanned aerial vehicles and driving methods, which is applied in the field of driving methods and systems of quadrotor unmanned aerial vehicles, can solve problems such as driving problems of quadrotor unmanned aerial vehicles, and achieve low maintenance costs, high system stability, and high reliability and safety effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described below are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
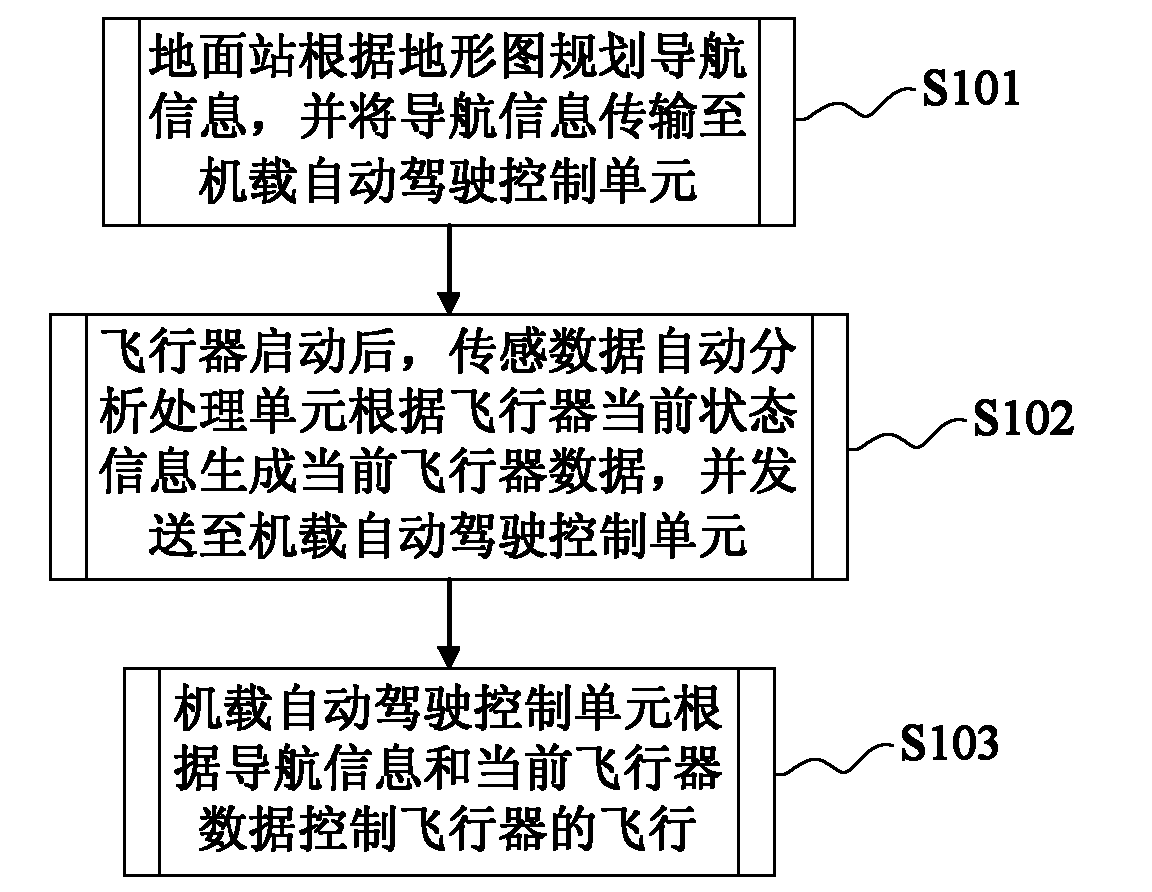
[0041] figure 1 Shows the schematic flow chart of the driving method of the quadrotor unmanned aerial vehicle provided by the present invention, as figure 1 Shown:
[0042] In step S101, the ground station plans navigation information according to the terrain map, and transmits the navigation information to the onboard automatic driving control unit.
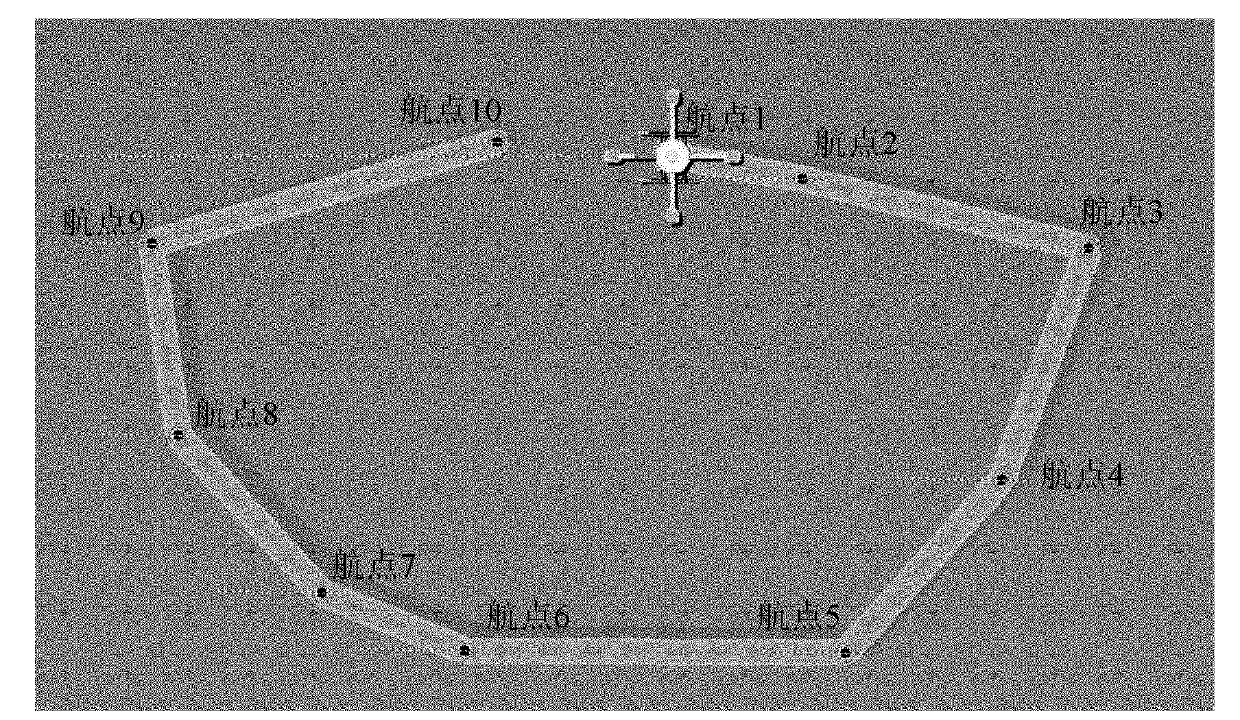
[0043] Before the aircraft starts, after the ground station extracts the target map from the topographic map, the flight path of the aircraft is determined on the target map, and then multiple waypoints are determined on the flight path. Determine the latitude and longitude coordinates, altitude, directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More