

Improved integral separation type PID control method
A control method and integral separation technology, applied in the field of PID control, can solve problems such as slow response speed, low adjustment accuracy, and inability to realize positive and negative adjustments, and achieve the effect of eliminating static errors and improving adjustment accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0027] Any feature disclosed in this specification (including any appended claims, abstract and drawings), unless expressly stated otherwise, may be replaced by alternative features which are equivalent or serve a similar purpose. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
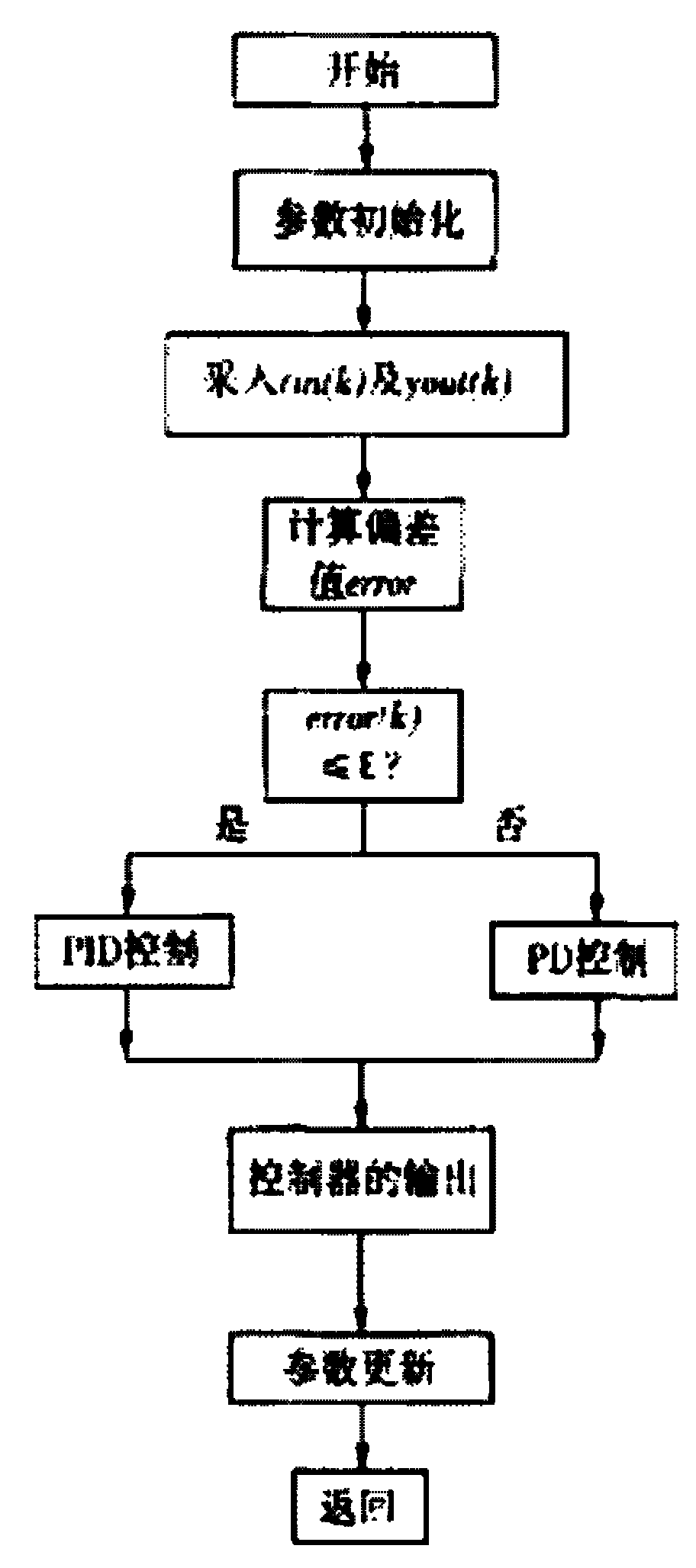
[0028] Such as figure 2 As shown, the improved integral-separation PID control method includes the following steps:
[0029] S1. Collect the tth actual output value yout(t), and calculate the tth control deviation e(t)=rin(t)-yout(t), where rin(t) represents a given value;
[0030] S2. Retrieve the proportional coefficient k from the memory p , integral coefficient k i , differential coefficient k d and the k-1th control deviation e(t-1)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More