

Flexible mechanical finger adaptive to shapes of clamped objects
A mechanical finger and self-adaptive technology, which is applied in the field of intelligent robots, can solve the problems of limited bearable load, etc., and achieve the effects of small impact, easy processing and installation, and simple motion trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with accompanying drawing:
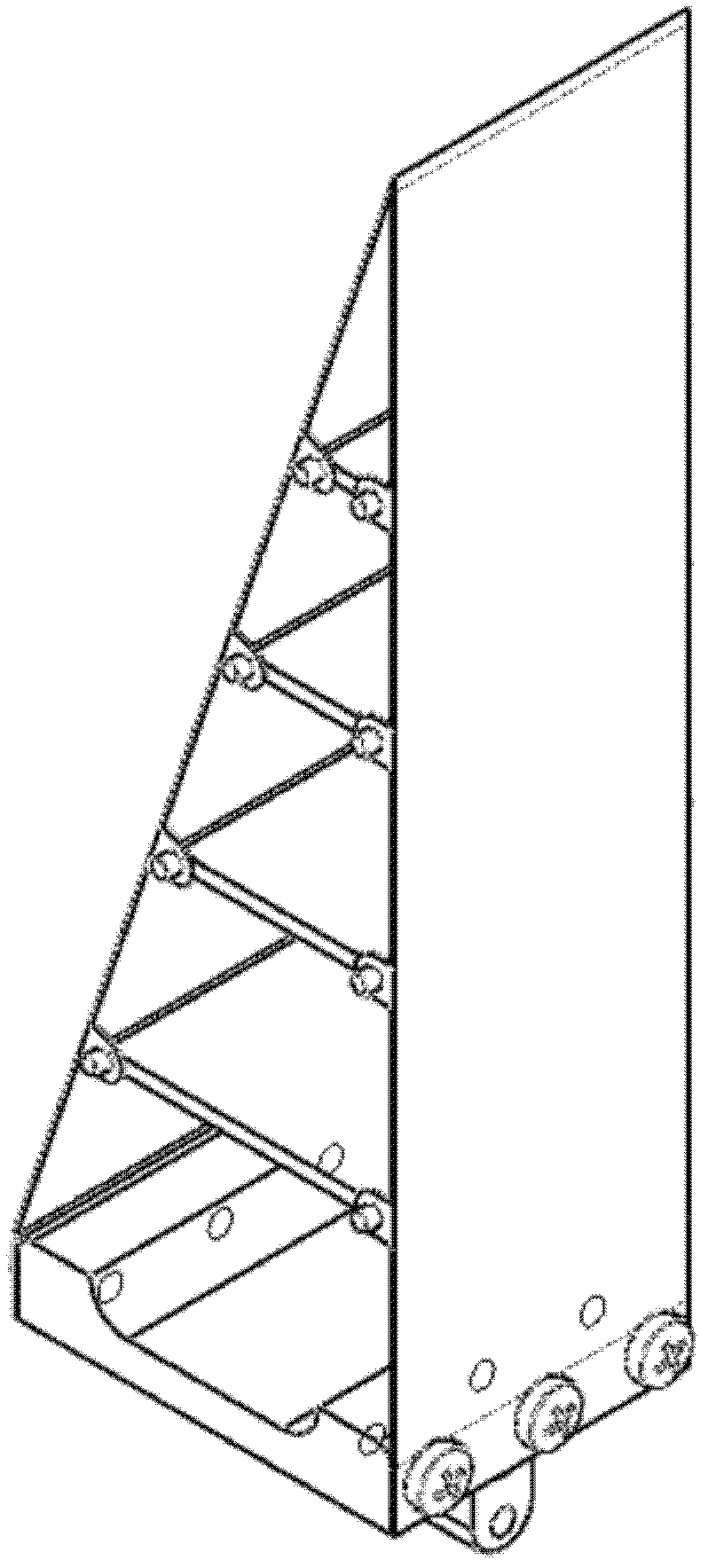
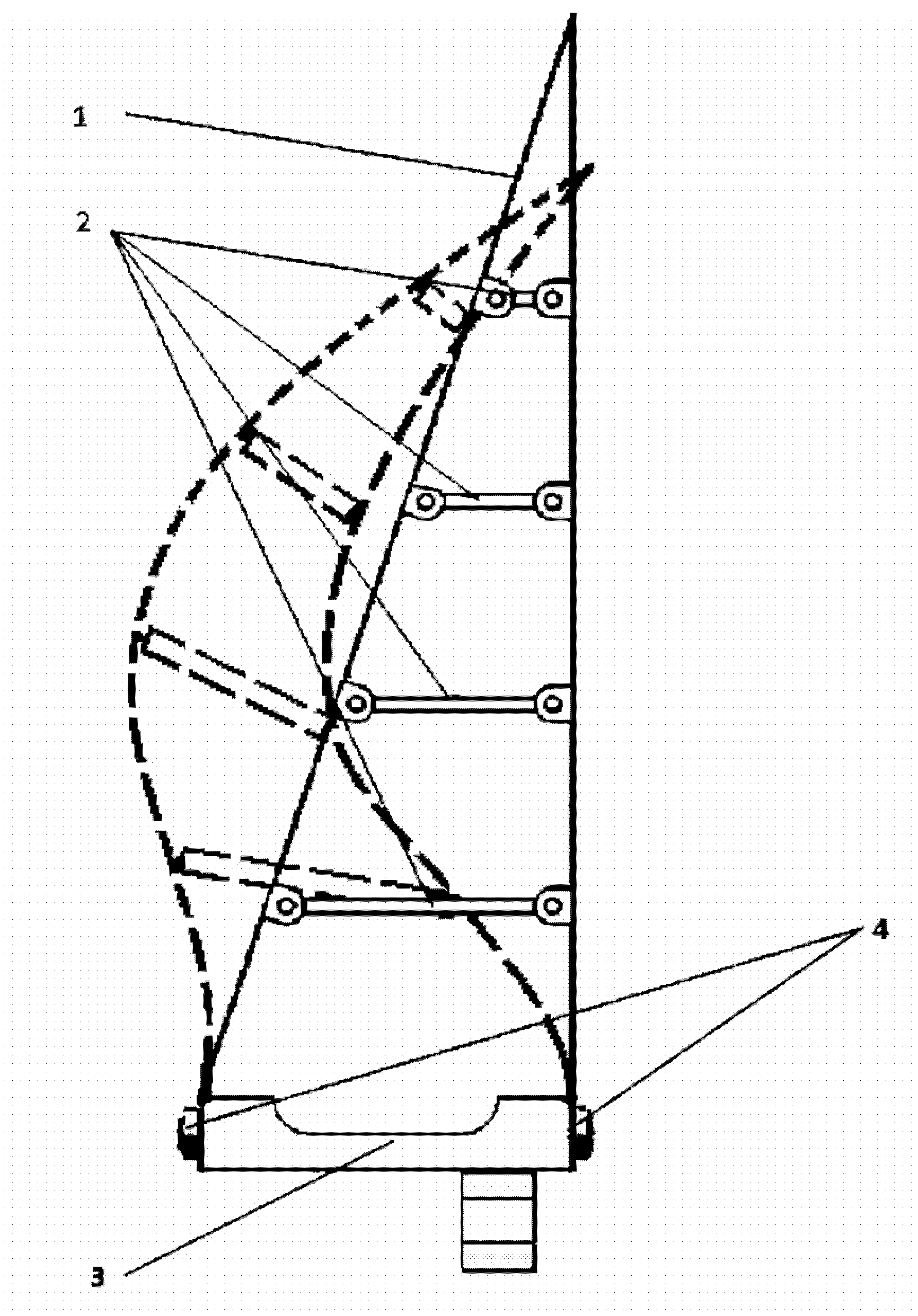
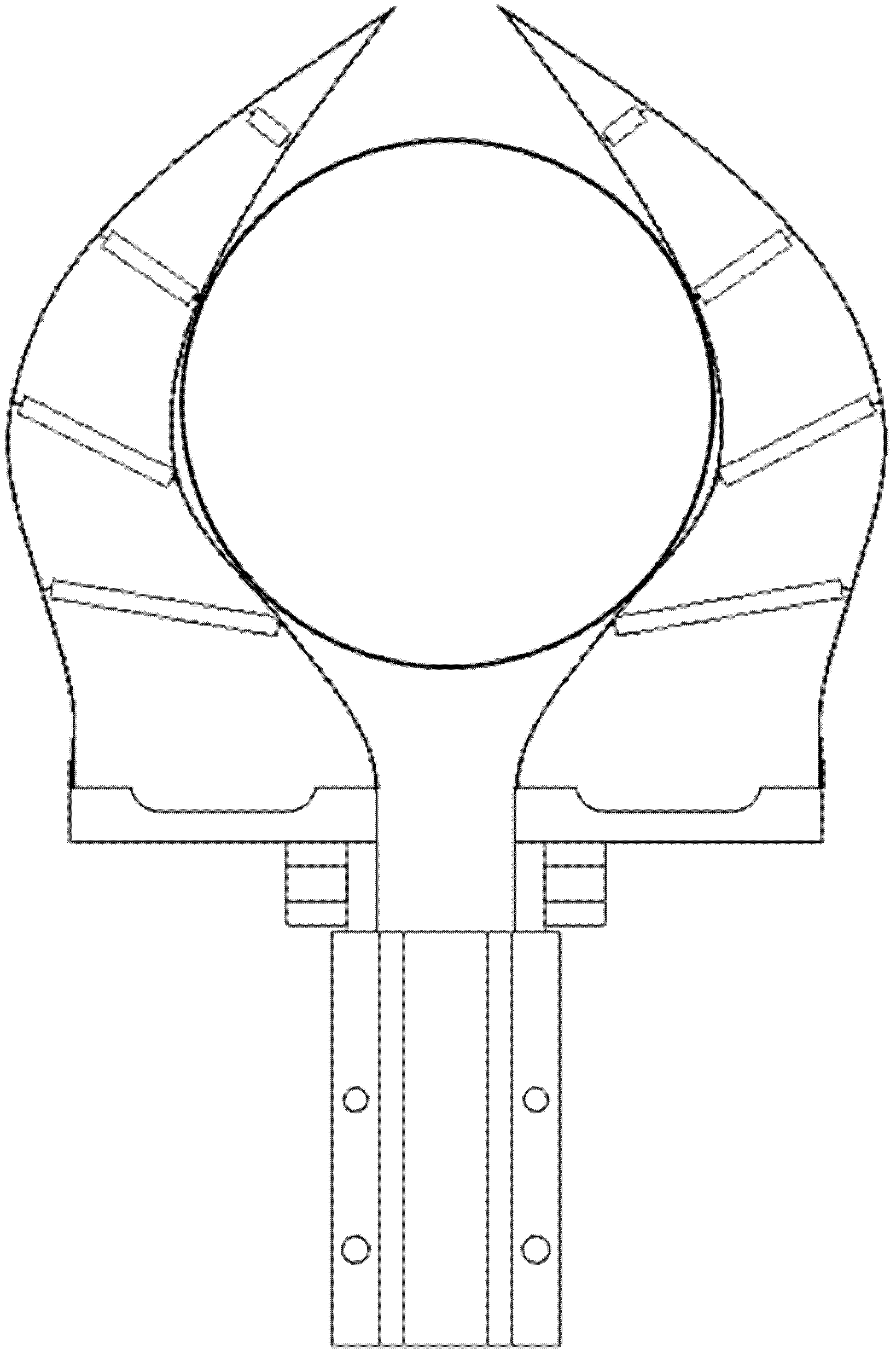
[0016] like figure 2 As shown, the flexible outer wall 1 is connected with the multi-stage rigid beam 2 step by step. Each rigid plate is connected with the flexible outer wall 1 by four rotating pairs. The flexible outer wall 1 is connected with the finger base 3 through screws 4 . In actual application, you can choose the cooperation of two claws, or you can choose the cooperation of multiple claws, such as image 3 As shown, the 180° open and close type air claw is used as the power source for the cooperation of the two claws.
[0017] Working process of the present invention is as follows:
[0018] like image 3 As shown, the 180° open-close type air gripper is used as the external power source. During the process of grabbing the workpiece, the vertical surface of the flexible outer wall 1 contacts the workpiece through the external power source. As the force incr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More