

Crawler belt and suction disc combined-type walking device design capable of being used for wall climbing robot
A technology of a wall-climbing robot and a walking device is applied in the field of technology and equipment, and can solve the problems of simple structure, inability to meet the requirements of crawler-type wall-climbing robots, and difficulty in ensuring the sealing performance, so as to improve efficiency, prevent reverse air leakage, and reduce air leakage. Gas convenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
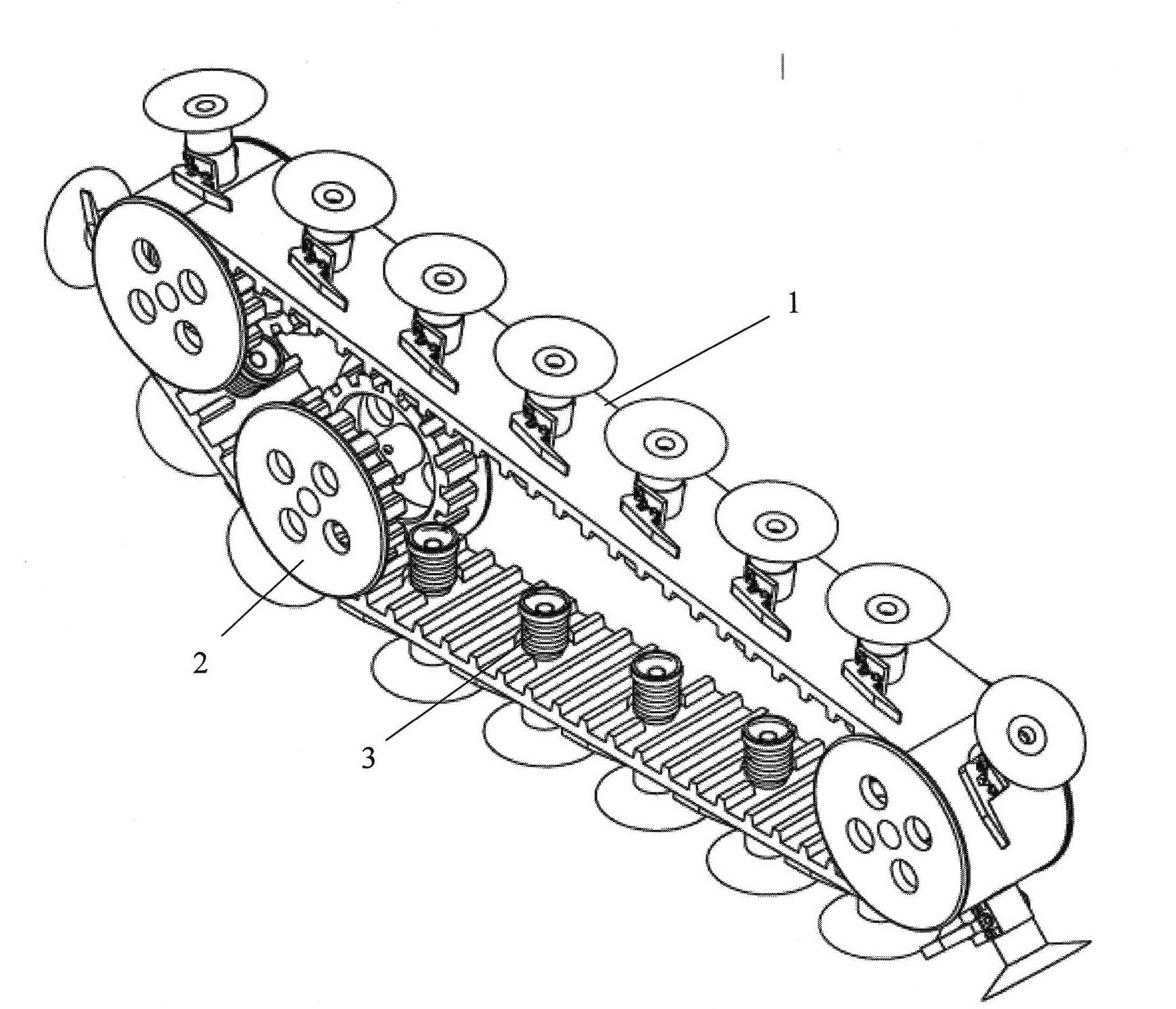
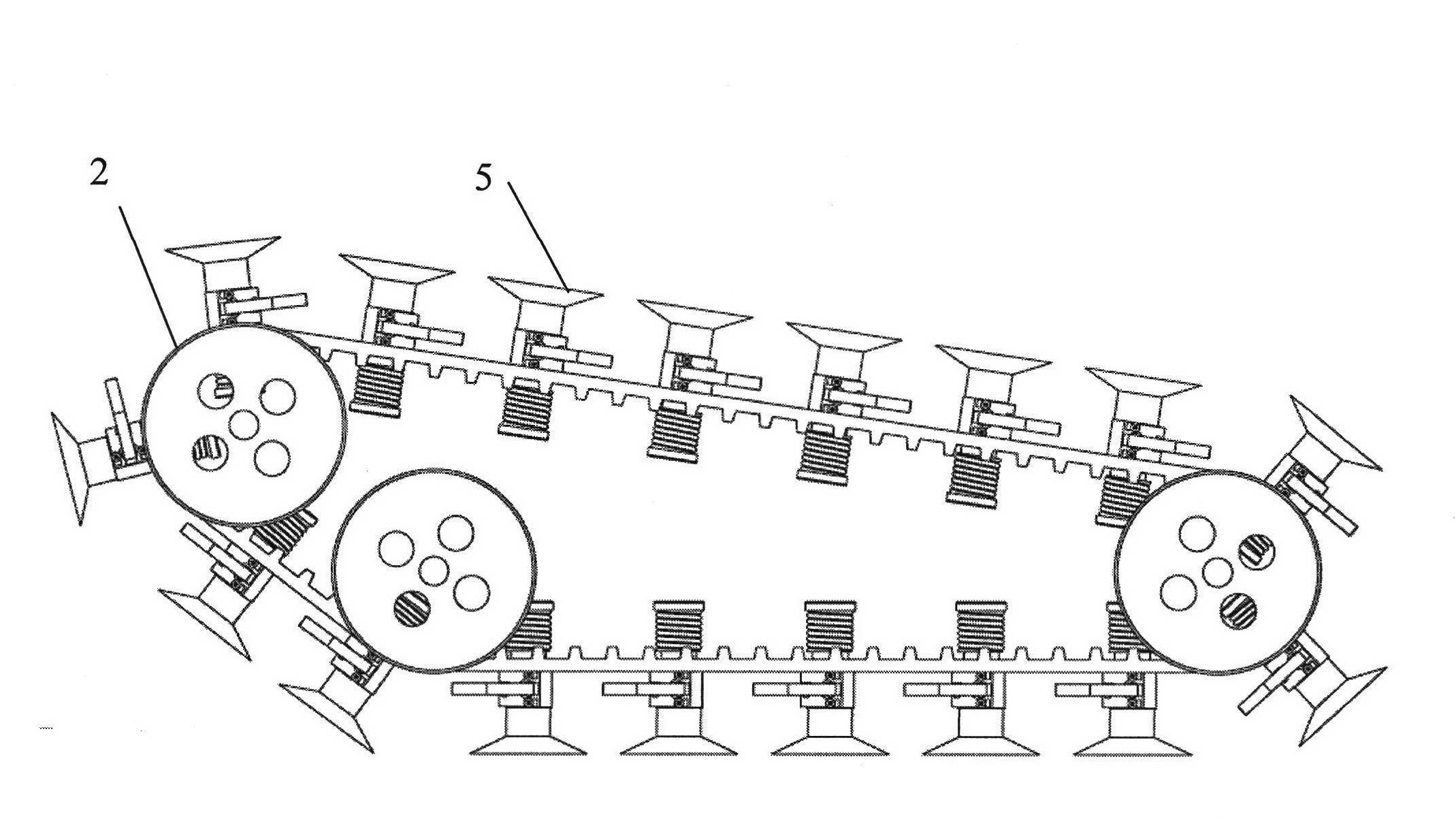
[0020] Such as figure 1 , 2 As shown, it is a schematic diagram of the overall design of the crawler suction cup of the wall-climbing robot, including the timing belt and the suction cup. The suction cup structure realizes the flexible cooperation between the suction cup and the processing hole of the timing belt (1) through the belt spring (3) to ensure the realization of its function. , the whole device can drive the synchronous pulley (2) by the motor and the reduction mechanism to realize the adsorption on the wall.
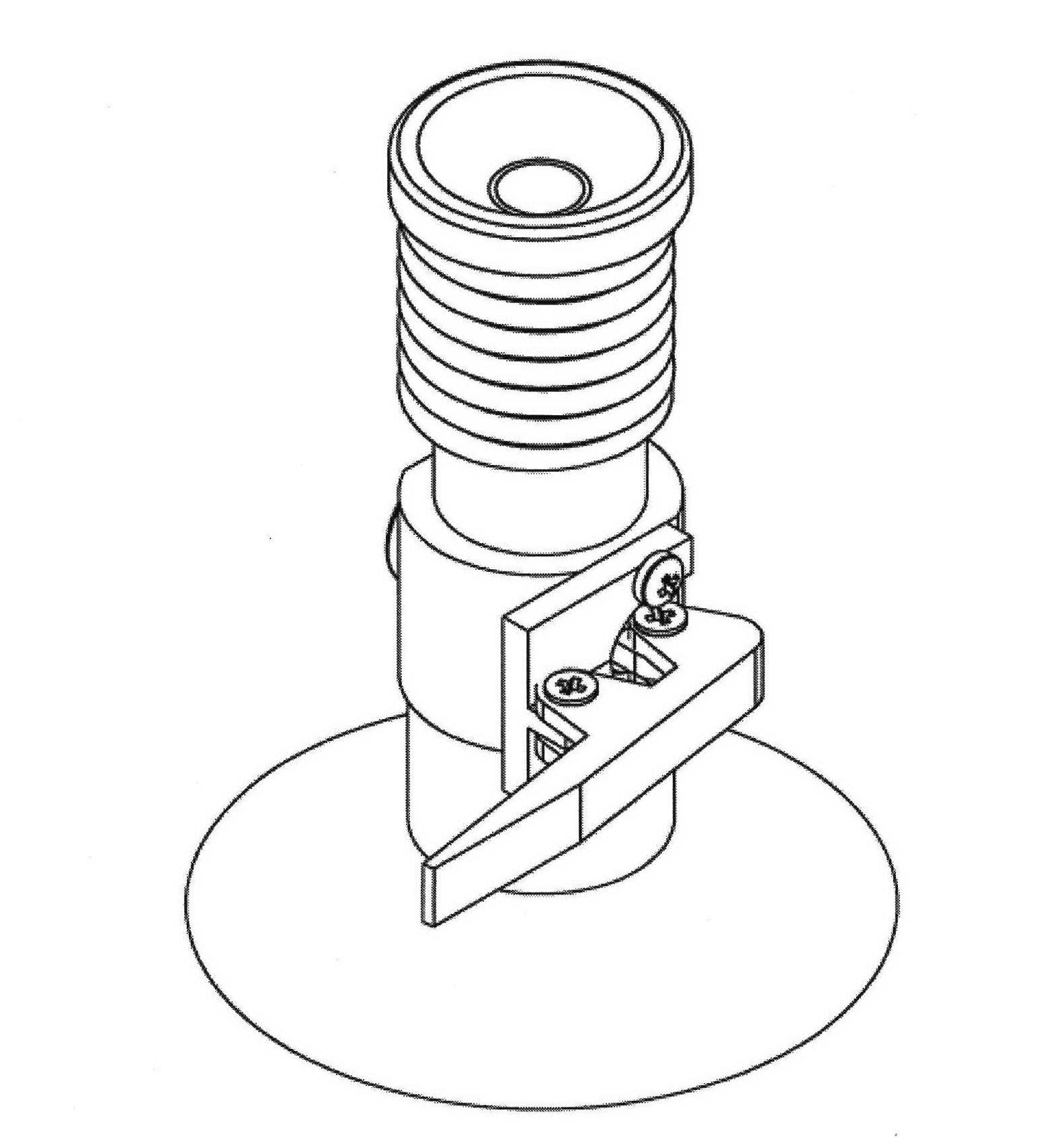
[0021] Such as image 3 , 4 As shown in , it is a schematic diagram of designing a sucker for a crawler sucker of a wall-climbing robot. The suction cup has a simple and light structure, and can be configured conveniently, quickly and reliably through the interface between the suction contact cup (6) and its corresponding air distribution mechanism.
[0022] Such as Figure 5 As shown, the sucker assembly drawing is designed for the crawler sucker of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More