

Z-axis lifting mechanism with stress state balancing function
A technology of stress state and lifting mechanism, which is applied in the direction of mechanical equipment, conveyor objects, belts/chains/gears, etc., can solve the problems of large and micro deformation of ball guide rails, short service life of ball guide rails, and complicated processing technology of columns, etc., to achieve Correct the problem of unstable center of gravity, the effect of strong load capacity and stable center of gravity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
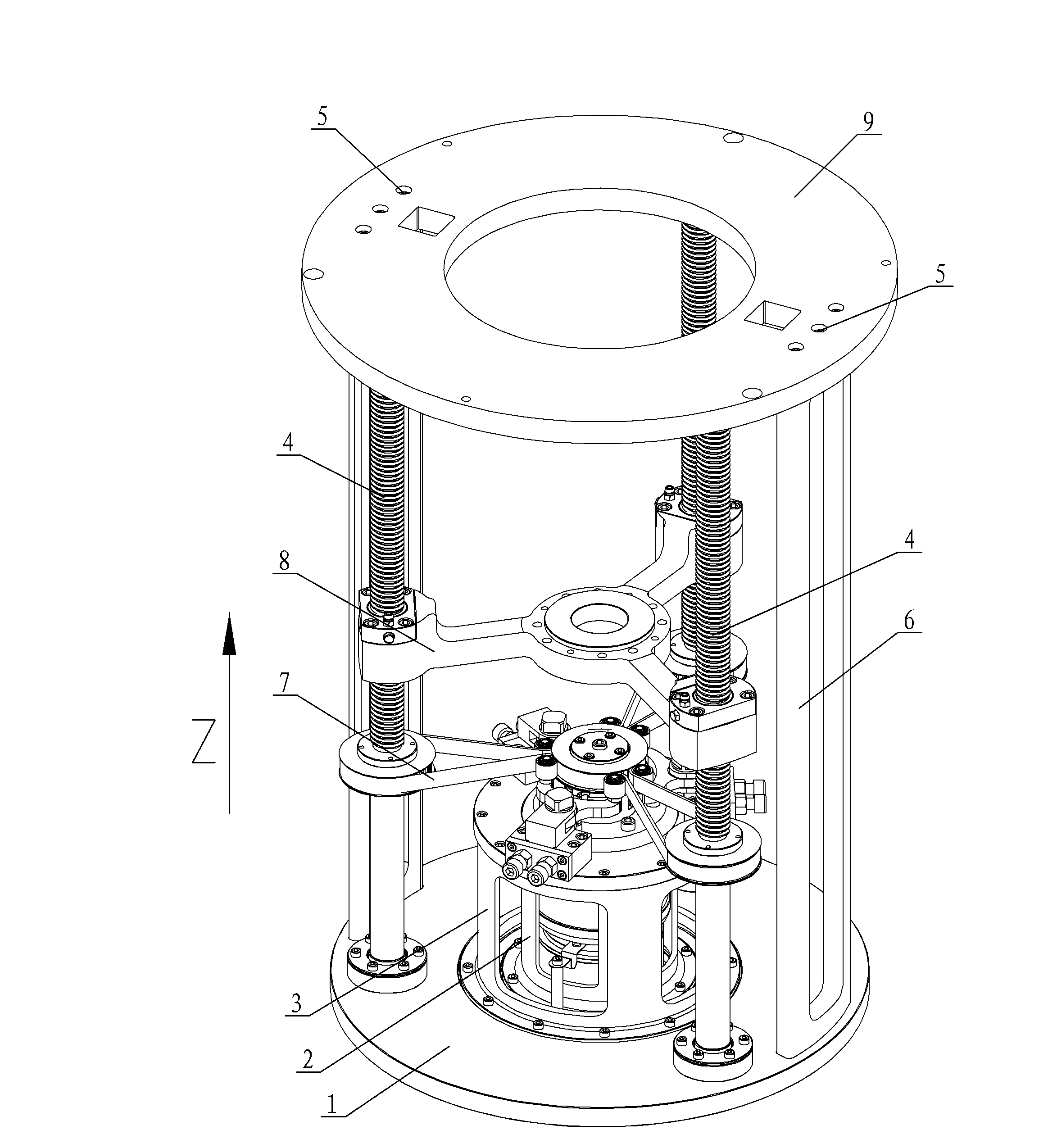
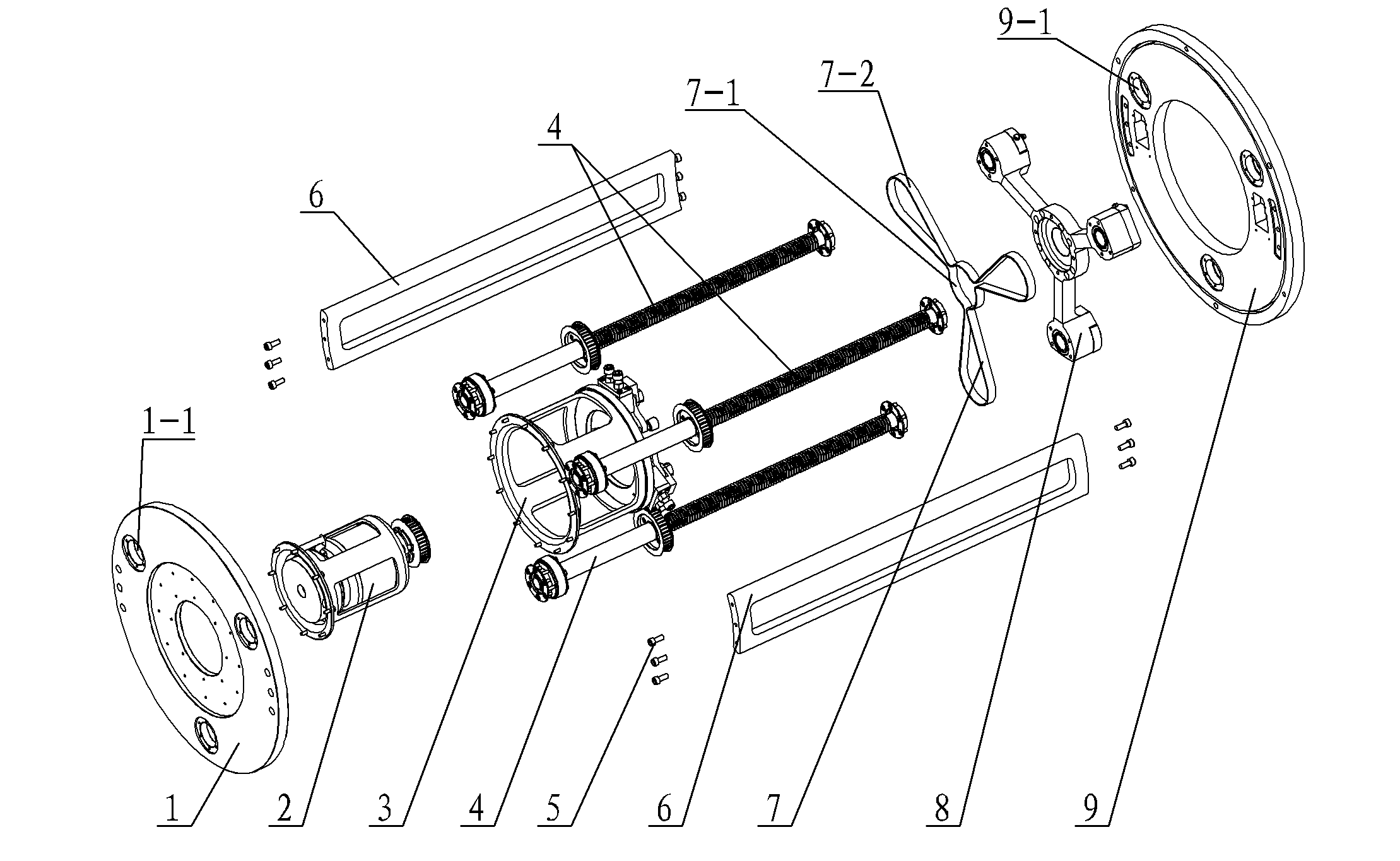
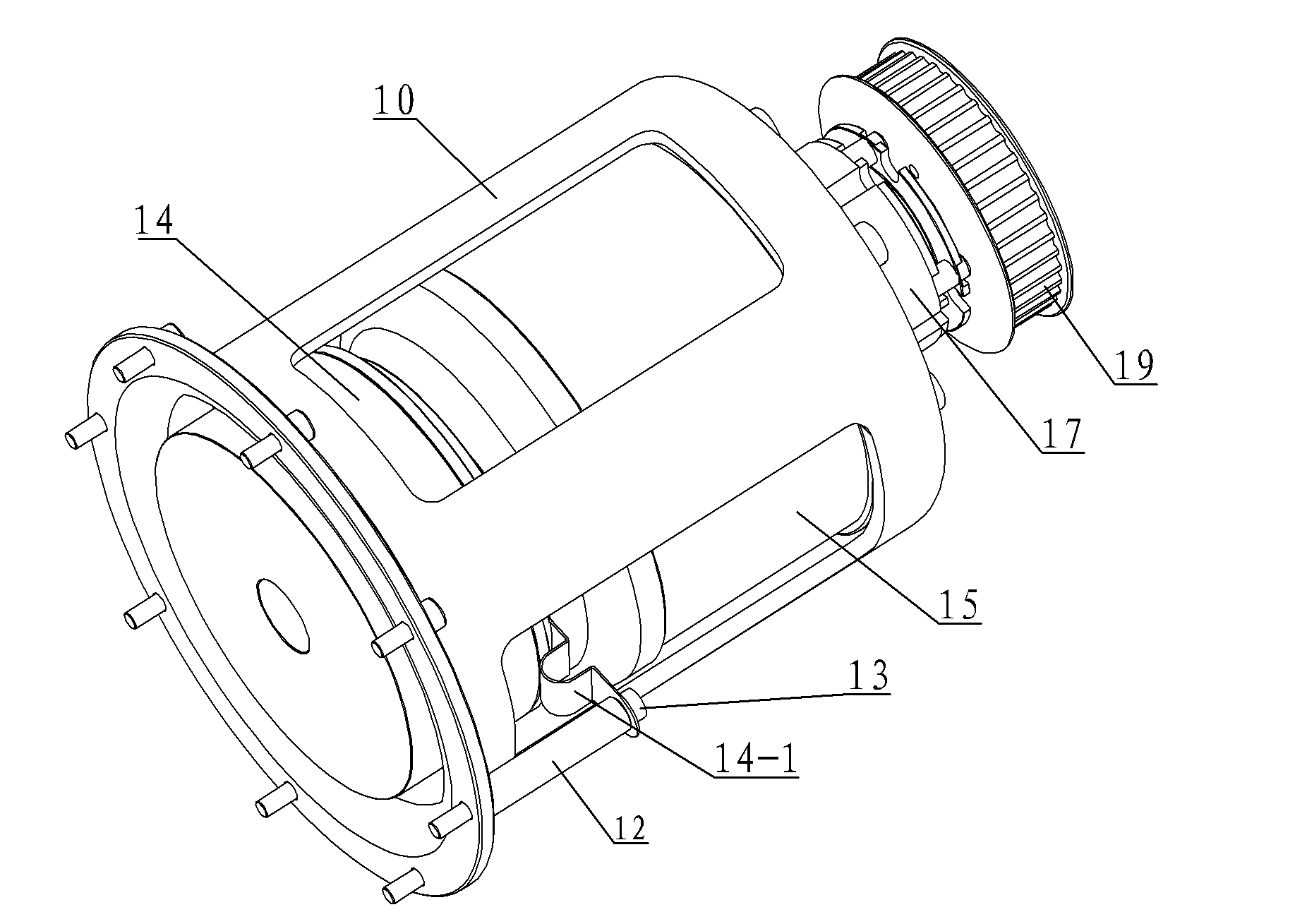
[0007] Specific implementation mode one: combine Figure 1 to Figure 8 Describe this embodiment, which includes a lower mounting base 1, a Z-axis drive assembly 2, a pretensioner support mechanism 3, a synchronous tooth transmission belt 7, a nut transmission mechanism 8, an upper mounting cover 9, two connecting plates 6 and Three screw drives 4, see image 3 and Figure 4 : Z-axis driving device assembly 2 includes Z-axis motor base 10, encoder positioning tube 12, encoder 14, Z-axis servo motor 15, friction brake 17, synchronous transmission driving gear 19 and connecting plate 20, the Z-axis servo The upper end of the motor 15 shaft is an output shaft 15-1, and the lower end is a motor shaft 15-2, and the Z-axis servo motor 15 is installed in the Z-axis motor seat 10 by a screw 16, and the output shaft 15-1 of the Z-axis servo motor 15- 1 is located outside the Z-axis motor base 10, and the upper end of the output shaft 15-1 is provided with a transmission external tooth...
specific Embodiment approach 2
[0008] Specific implementation mode two: combination Figure 6 Describe this embodiment, each pretension wheel mechanism 38 of this embodiment includes a pretension wheel shaft 39, a pretension wheel 41, a shaft circlip 42 and two pretension wheel bearings 40, and the pretension wheel 41 A preload wheel bearing 40 is respectively installed at the upper and lower recesses of the inner cavity, the preload wheel 41 is installed on the preload wheel shaft 39, and the shaft circlip 42 is installed on the upper end of the preload wheel shaft 39 exposed on the preload wheel 41 upper end surface. In the groove, the circlip 42 for the shaft is used to fix the relative position of the pretensioner bearing 40 . Other components and connections are the same as those in the first embodiment.
[0009] The working principle of the present invention is: when the Z-axis servo motor 15 is running, the encoder 14 installed on the motor shaft 15-2 at the lower end of the Z-axis servo motor 15 st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More