

REVO (Resident Encrypted Variable Output) measuring head position posture calibrating method in joint arm type coordinate measuring machine
A coordinate measuring machine and calibration method technology, which is applied to measuring devices, instruments, etc., can solve the problem of low accuracy of measurement results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
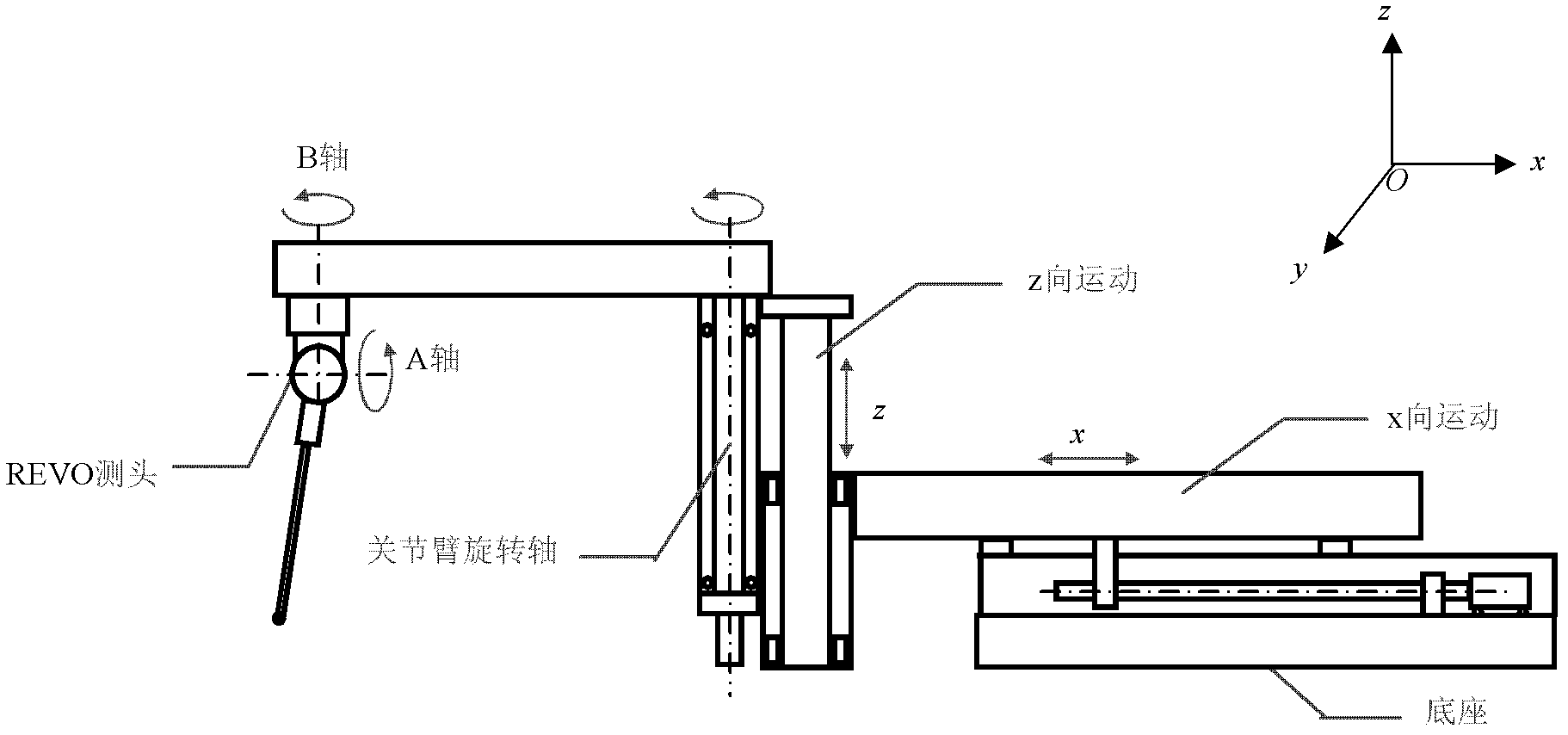
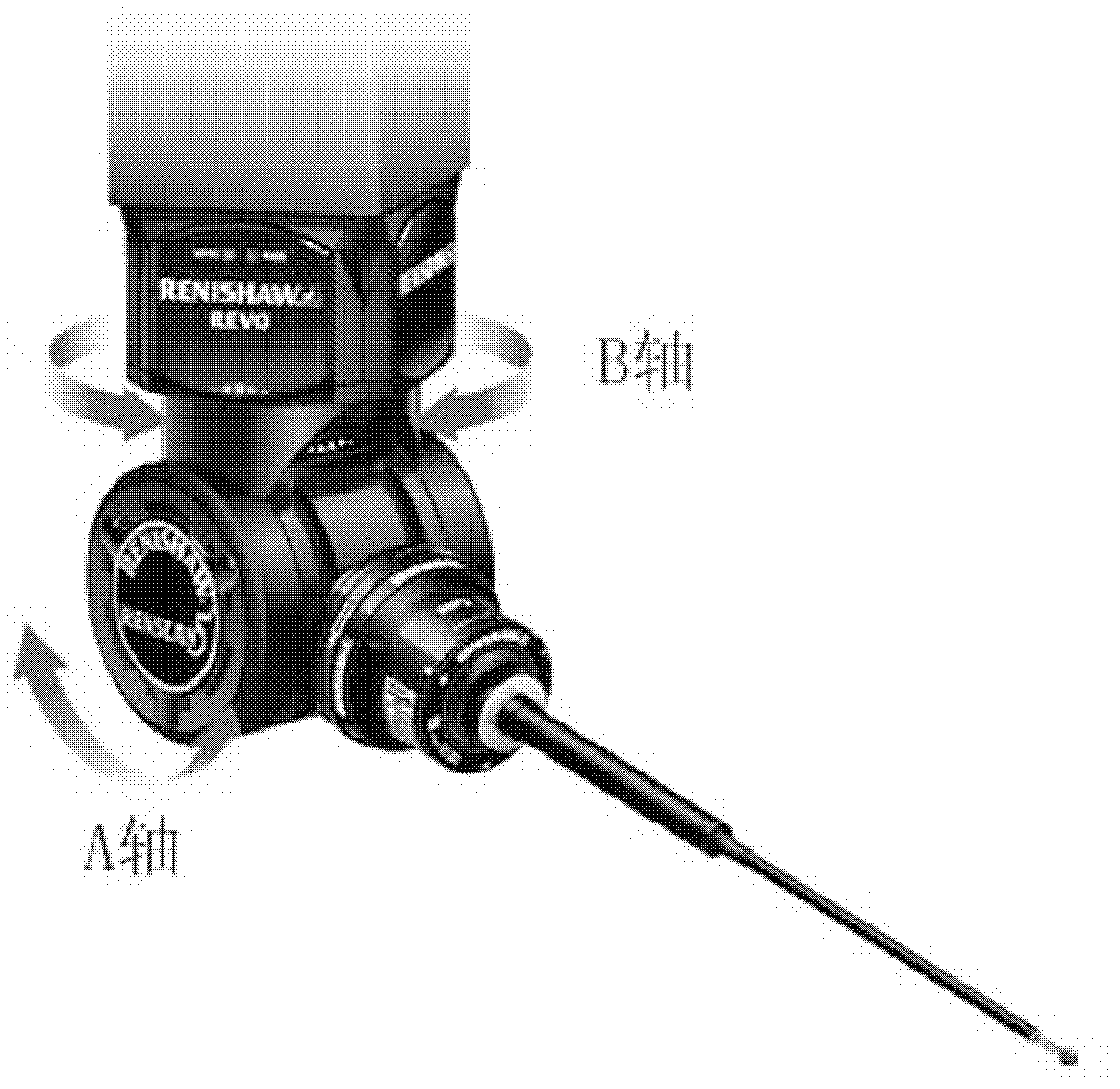
[0049] The present invention provides a calibration method for the position and posture of the REVO probe. The calibration includes two aspects: one is the calibration of the parallelism between the B axis of the REVO probe and the z-axis movement axis, and the other is the A axis and the x direction of the REVO probe. Calibration of the parallelism of the axis of motion.
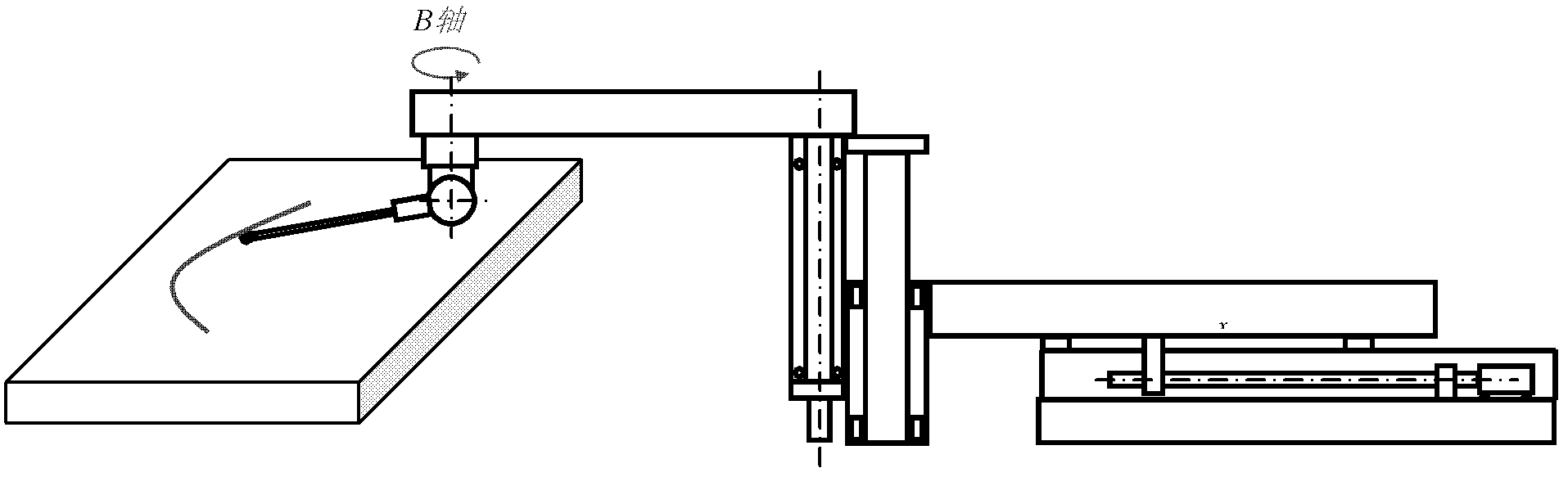
[0050] For ease of explanation, create as figure 1 In the coordinate system shown, the x-axis is parallel to the x-axis motion axis, the z-axis is parallel to the z-axis motion axis, and the y-axis is perpendicular to the x-axis and the z-axis. The calibration of the parallelism between the B-axis and the z-axis of the REVO probe can be divided into two aspects. One is the calibration of the parallelism between the B-axis and the z-axis of motion in the xoz coordinate plane, and the other is the B-axis and the z-axis of motion. Parallelism calibration in the yoz coordinate plane. In the same way, the calibrat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More