

Industrial robot
A technology for industrial robots and components, applied in manipulators, metal processing, manufacturing tools, etc., can solve the problems of narrow application range, small size, large volume, etc., and achieve the effect of reliable and unmanned
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] An embodiment of the present invention is described below in conjunction with the accompanying drawings.
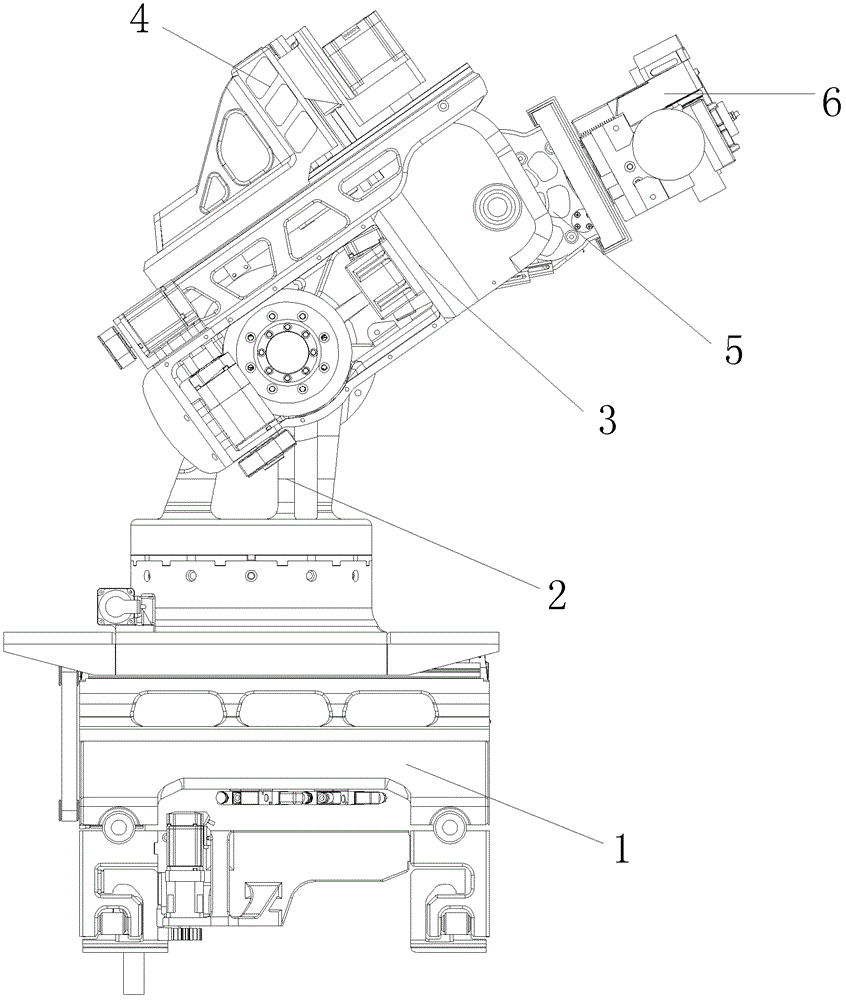
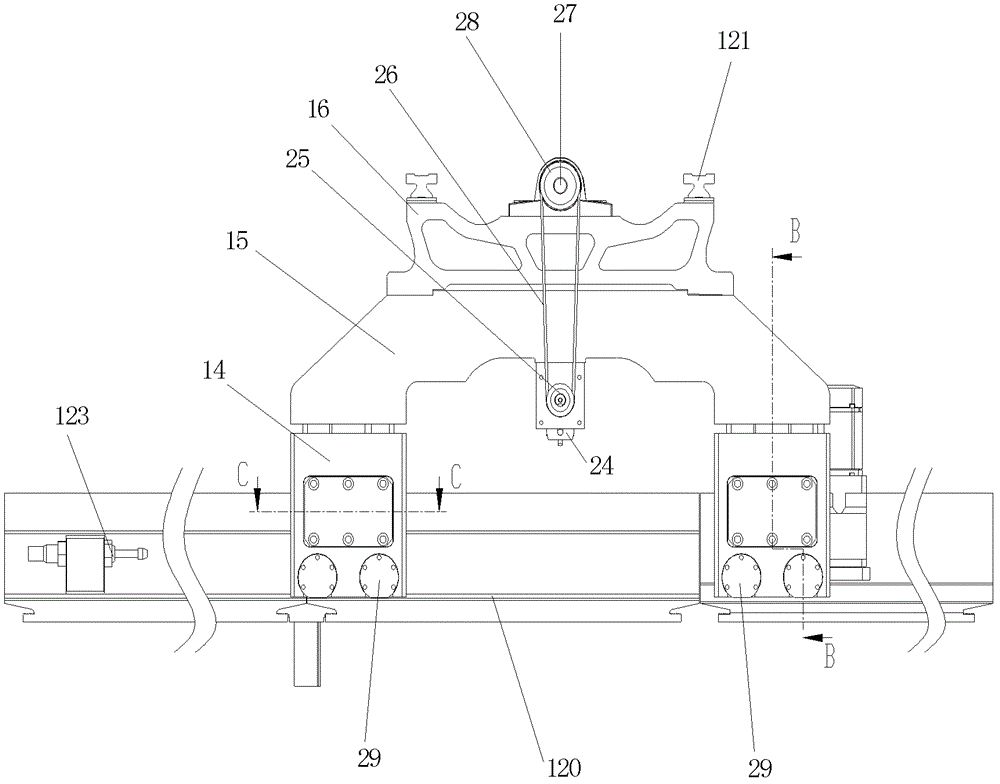
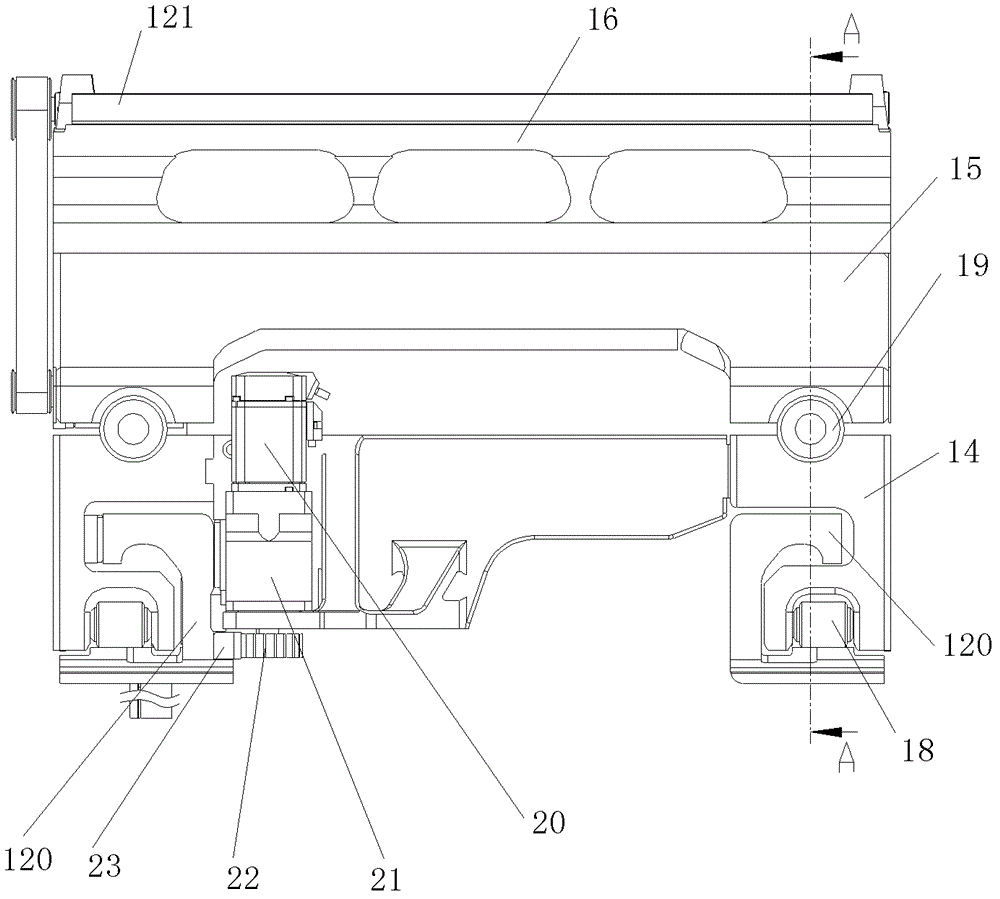
[0056] Such as figure 1 The shown industrial robot includes a base rail assembly 1, a base assembly 2, a boom assembly 3, an engraving and milling assembly 4, a wrist assembly 5 and a gripper assembly 6, and the lower end of the base rail assembly 1 is in contact with the guide rail 1 120 It is suitable and can roll along the guide rail I 120. The lower end of the base assembly 2 is adapted to the guide rail II 121 provided on the upper end of the base guide rail assembly 1 and can slide along the guide rail II 121. The base assembly 2 is composed of an upper assembly 7 and a lower assembly 8 , and the upper assembly 7 can rotate around the lower assembly 8; the shoulder shaft 9 on the boom assembly 3 is in floating fit with the shoulder shaft hole 10 on the upper part of the upper assembly 7, and the boom assembly 3 realizes the arm raising or lowering action; Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More