

Master-slave robot for high obstacle crossing and accurate bomb disposal and explosion elimination
A robotic and precise technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as loss and on-site destruction, and achieve the effect of wide application range and environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
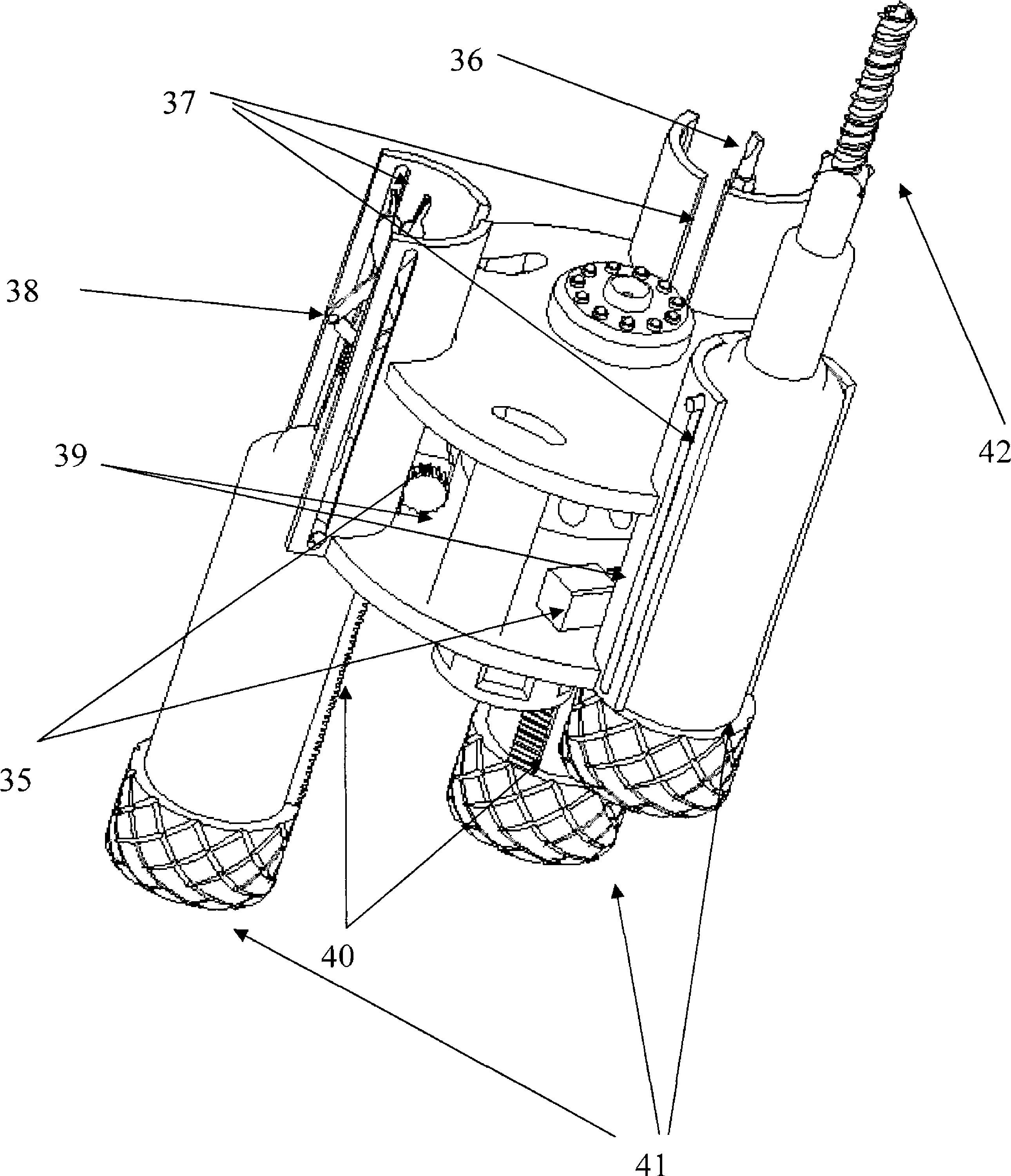
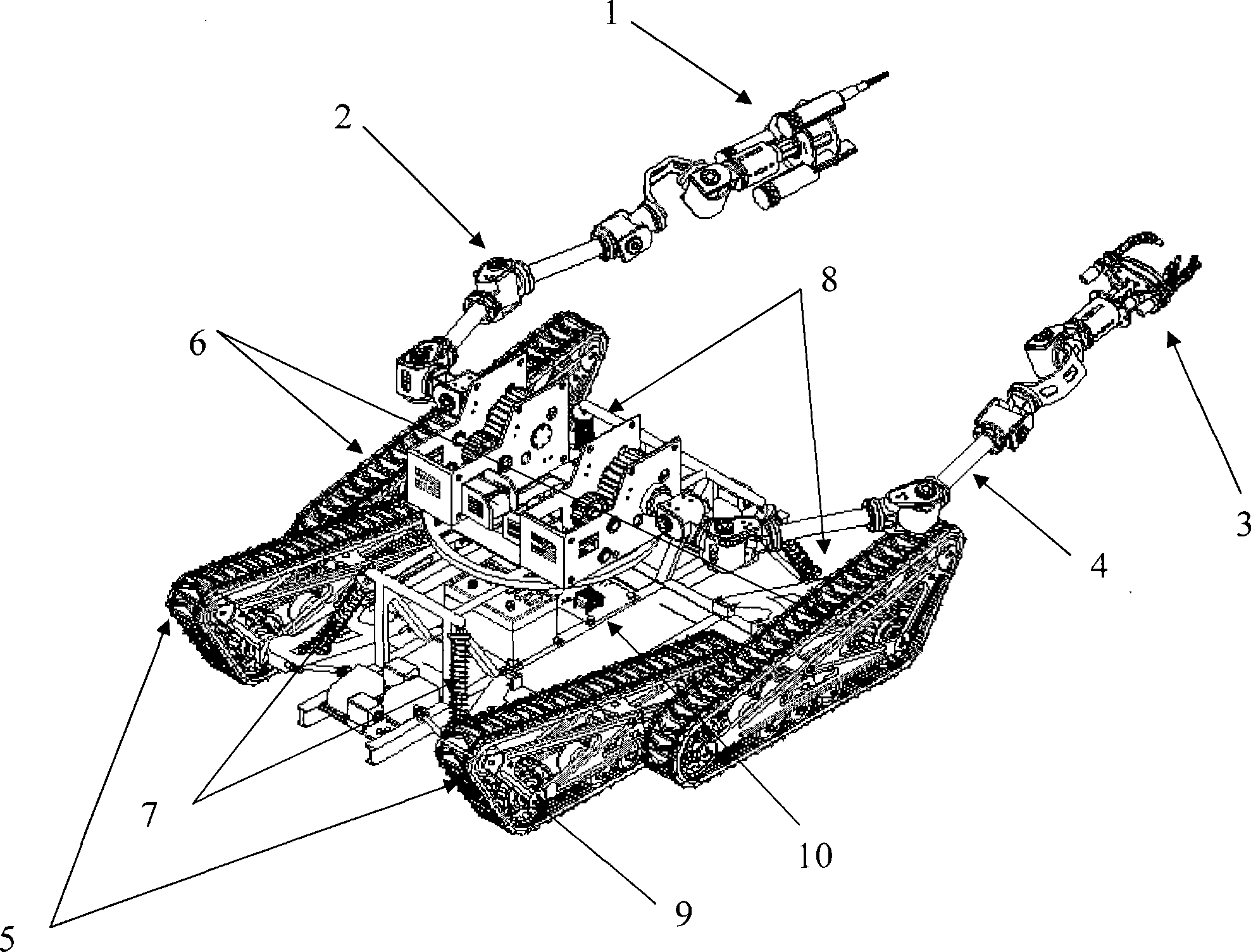
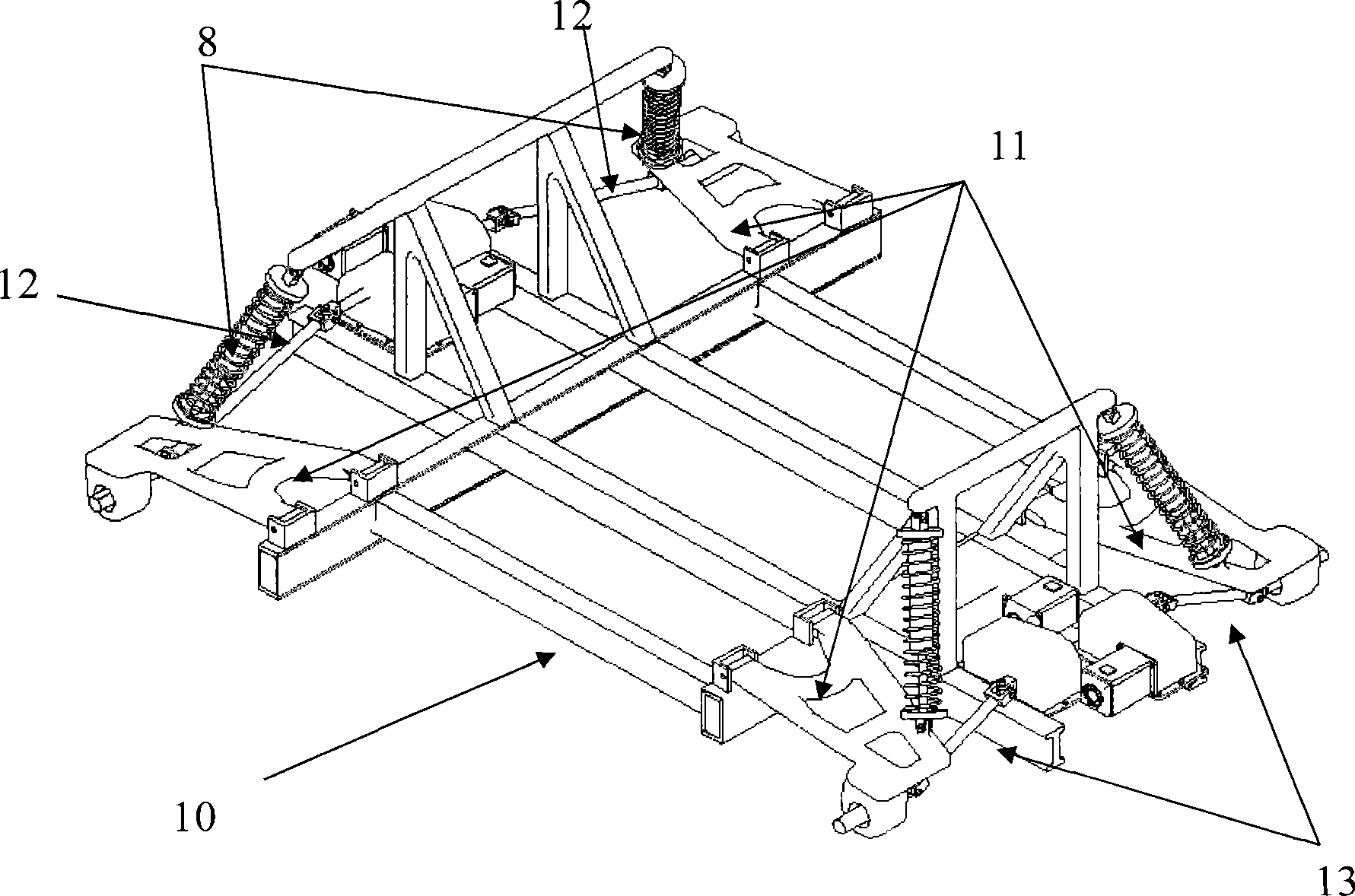
[0023] Embodiment 1, a master-slave robot for high obstacle-surmounting and precise bomb disposal, including a gripping hand device, a tool hand device, a frame 10 and a crawler walking mechanism; wherein: the gripping hand device is composed of a gripping hand 3, Clamping arm 4, the first rotating pair 21 of the clamping arm, the second rotating pair 22 of the clamping arm, the third rotating pair 23 of the clamping arm, the fourth rotating pair 24 of the clamping arm, the fifth rotating pair 25 of the clamping arm, The sixth rotating pair 26 of the clamping arm and the seventh rotating pair 27 of the clamping arm are composed; the clamping hand 3 is composed of a root rotating finger 28, a root fixed finger 29, a finger rotating arm 30, a manipulator palm seat 31, and a first finger. Rotating pair 32, the second rotating pair 33 of fingers and the third rotating pair 34 of fingers are formed; the tool hand device is composed of tool hand 1, tool arm 2, the first rotating pair...
Embodiment 2
[0024] Embodiment 2, a master-slave robot for high obstacle-surmounting and precise bomb disposal, including a gripping hand device, a tool hand device, a frame 10 and a crawler walking mechanism; wherein: the gripping hand device is composed of a gripping hand 3, Clamping arm 4, the first rotating pair 21 of the clamping arm, the second rotating pair 22 of the clamping arm, the third rotating pair 23 of the clamping arm, the fourth rotating pair 24 of the clamping arm, the fifth rotating pair 25 of the clamping arm, The sixth rotating pair 26 of the clamping arm and the seventh rotating pair 27 of the clamping arm are composed; the clamping arm 4 passes through the first rotating pair 21 of the clamping arm, the second rotating pair 22 of the clamping arm, and the third rotating pair of the clamping arm 23. The fourth rotating pair 24 of the clamping arm, the fifth rotating pair 25 of the clamping arm, the sixth rotating pair 26 of the clamping arm, and the seventh rotating pa...
Embodiment 3
[0031] Embodiment 3, a master-slave robot for high obstacle-surmounting and precise bomb disposal and detonation, wherein: the clamping hand device and the tool hand device have a total of 7 degrees of freedom; the clamping arm of the clamping hand device has a first rotating pair 21 , the second rotating pair 22 of the clamping arm, the third rotating pair 23 of the clamping arm, the fourth rotating pair 24 of the clamping arm, the fifth rotating pair 25 of the clamping arm, the sixth rotating pair 26 of the clamping arm and the fifth rotating pair of the clamping arm Seven revolving pairs 27 There are seven revolving pairs in total, the maximum elongation is 950mm; the first revolving pair 14 of the tool arm of the tool hand device, the second revolving pair 15 of the tool arm, the third revolving pair 16 of the tool arm, and the fourth revolving pair 17 of the tool arm , the fifth rotating pair 18 of the tool arm, the sixth rotating pair 19 of the tool arm and the seventh ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More