

Self-adaptive three-dimensional space path planning method based on particle swarm algorithm
A particle swarm algorithm and three-dimensional space technology, applied in the field of computational intelligence, can solve problems such as the optimal path is not smooth, it is difficult, and path planning tasks cannot be completed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
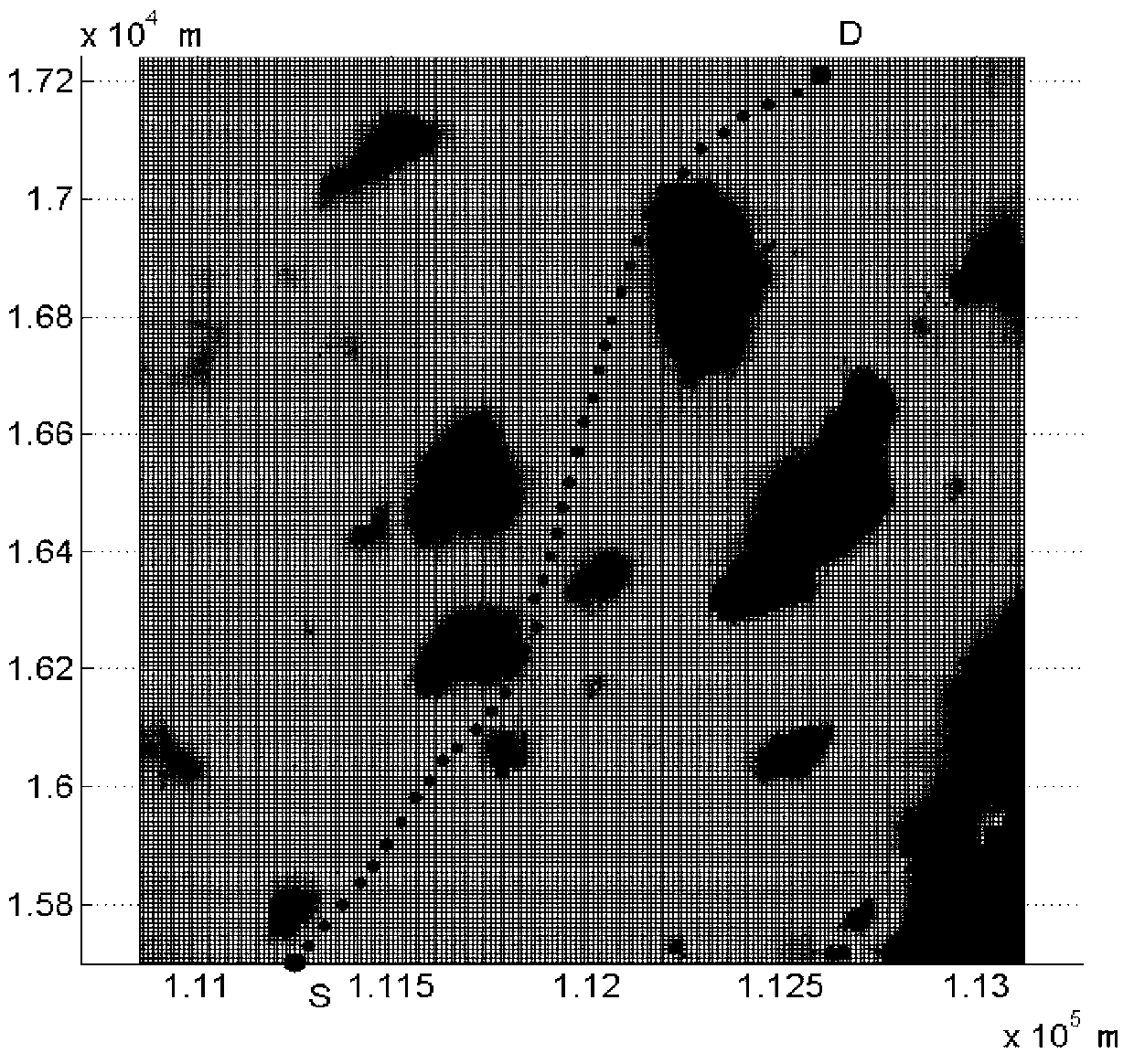
[0115] Starting point coordinate S=(11125015700-600); end point coordinate D=(11260017210-600)m; number of population n=10; number of particle nodes m=42; maximum number of iterations k max =300; the upper and lower bounds of the displacement are respectively Among them, L=2272 is the larger value of the length and width of the map; the inertia weight is based on the formula OK, where ω max = 0.9, ω min =0.4, k is the number of iterations; learning factor c 1 According to the formula c 1 = c 1 max - ( k k max ) u c · ( c 1 max - c 1 min ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More