

Parameter optimization method for six-degree of freedom parallel mechanism for modal space control
A modal space and optimization method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that modal space decoupling control is still applicable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
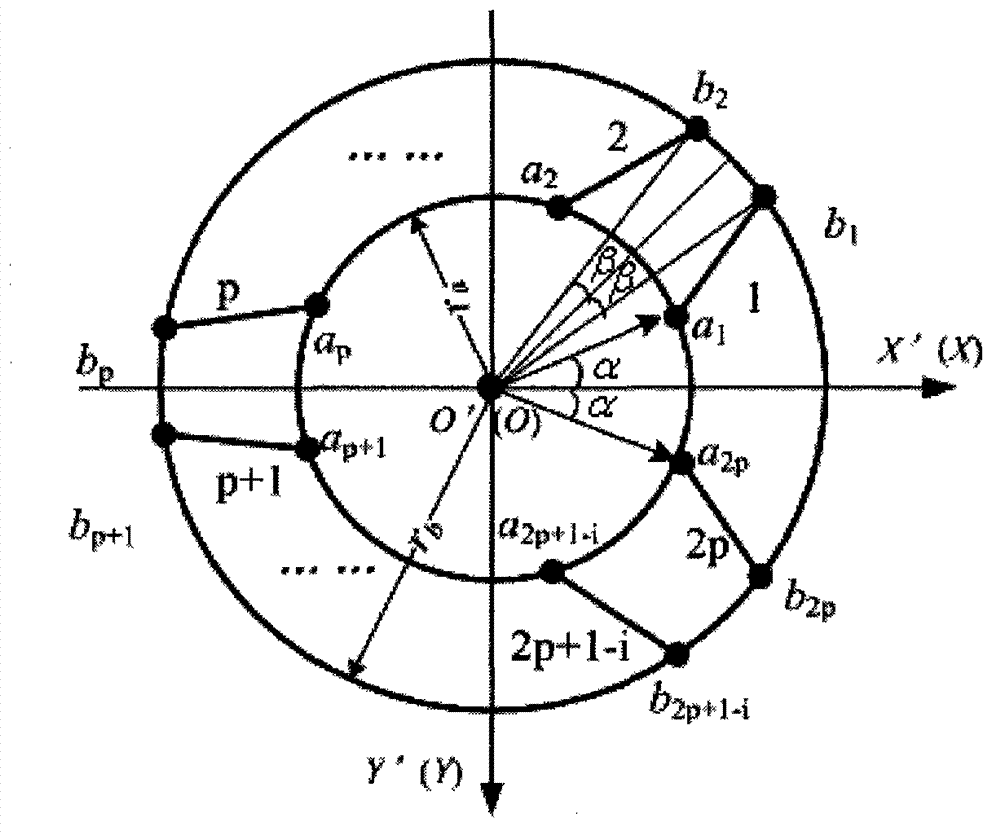
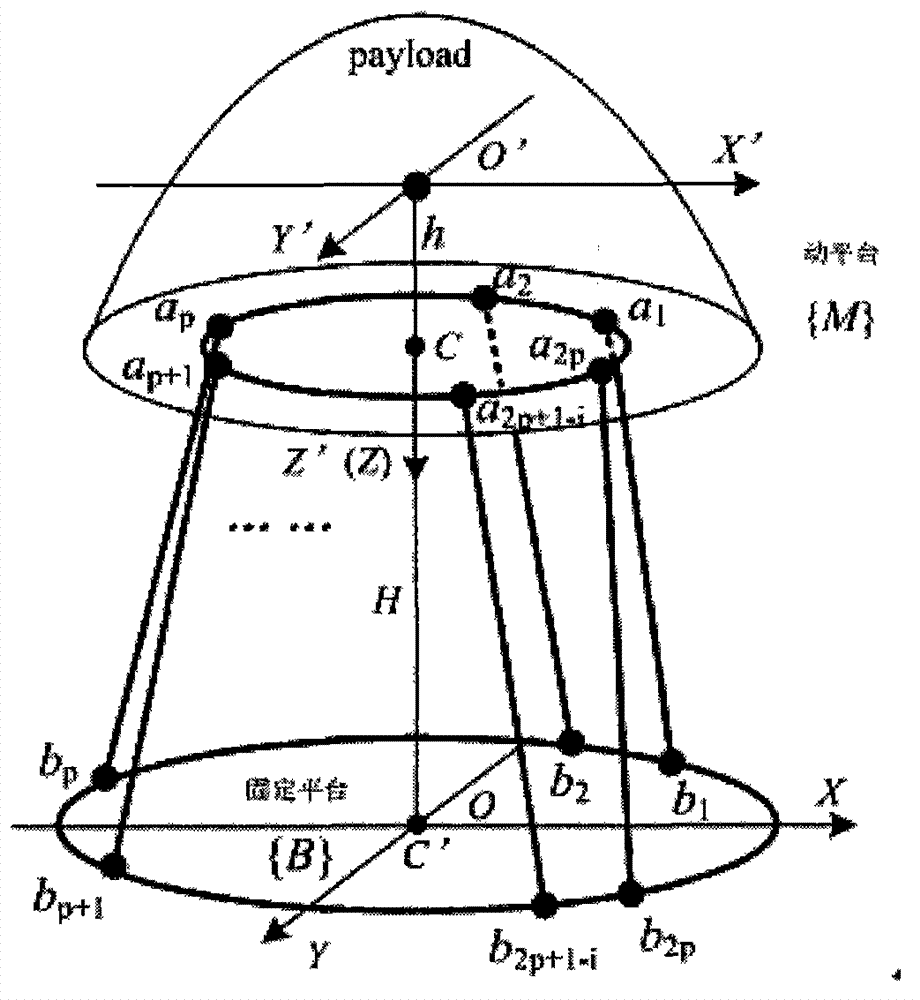
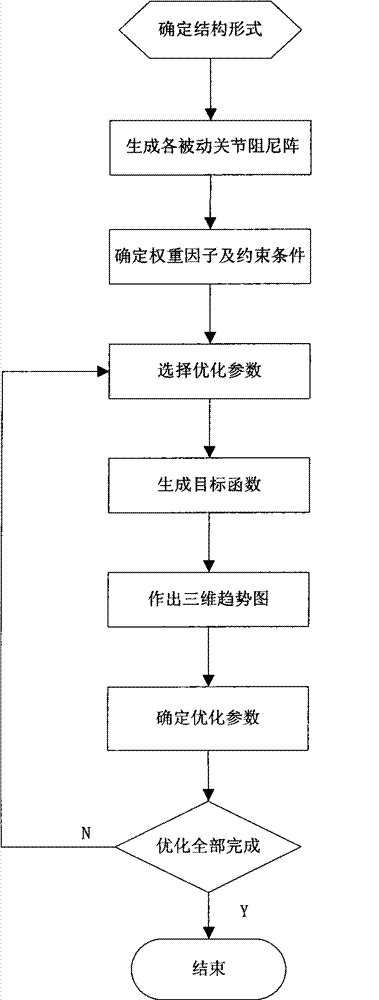
[0112] Step 1: Determine System Configuration
[0113] The configuration of the system to be optimized is the 6-leg UCU (double-end universal joint or Hooke hinge), p=3, and its structural diagram is shown in the attached image 3 As shown, the schematic diagram of a single outrigger is attached Figure 4 shown.
[0114] Step 2: Generate the damping matrix of each passive joint.
[0115] Lower hinge damping array:
[0116] Direction 1: C cd 1 = diag ( C cd 1 x C ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More