

Track self-directed moving robot
An autonomous mobile and robot technology, applied in the direction of manipulators, collectors, motor vehicles, etc., can solve the problems of the impact of the working time of the rechargeable battery and the difficulty of continuous fixed-point observation, etc., and achieve the effect of continuous working time, avoiding self-interference, and smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
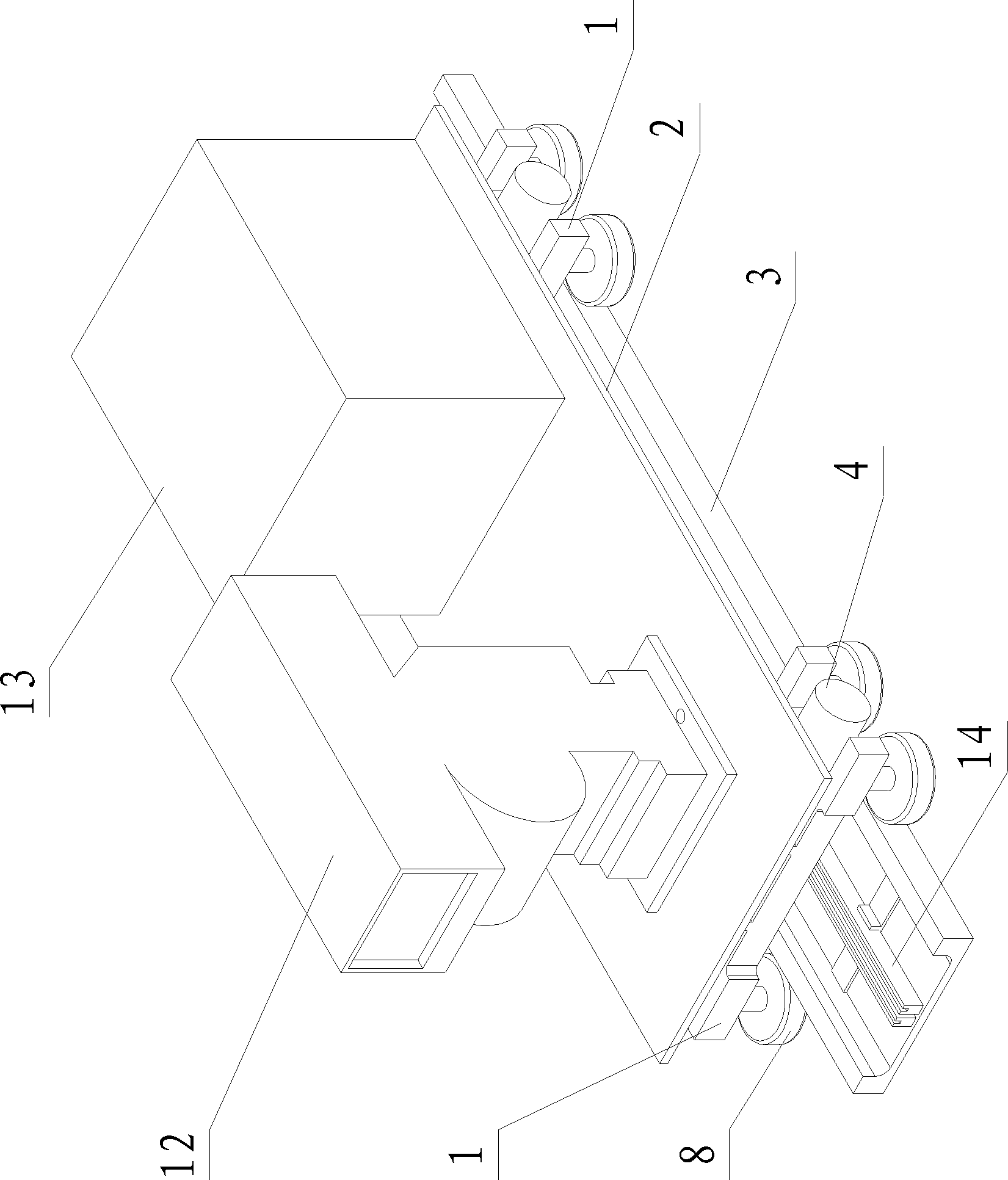
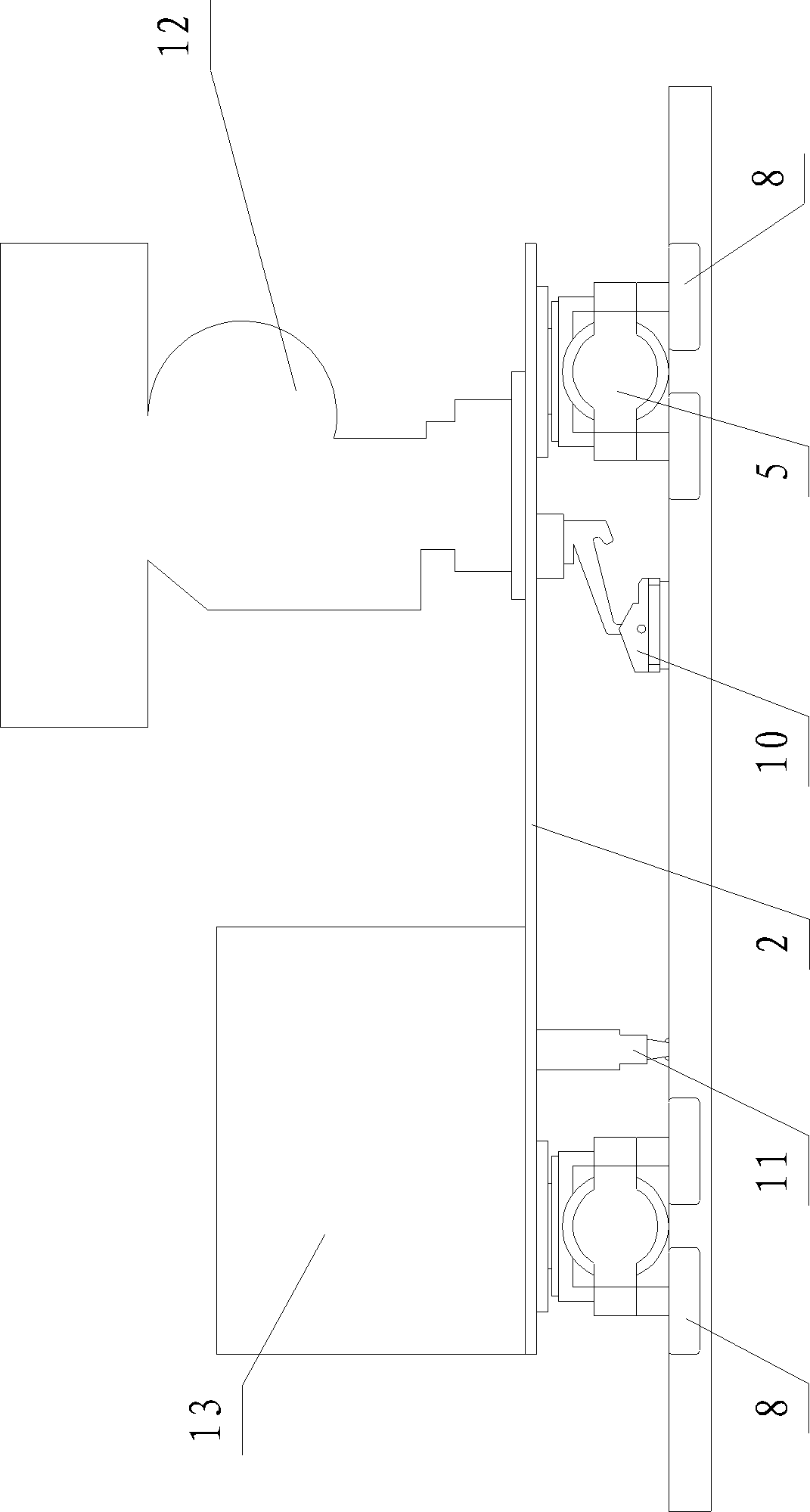
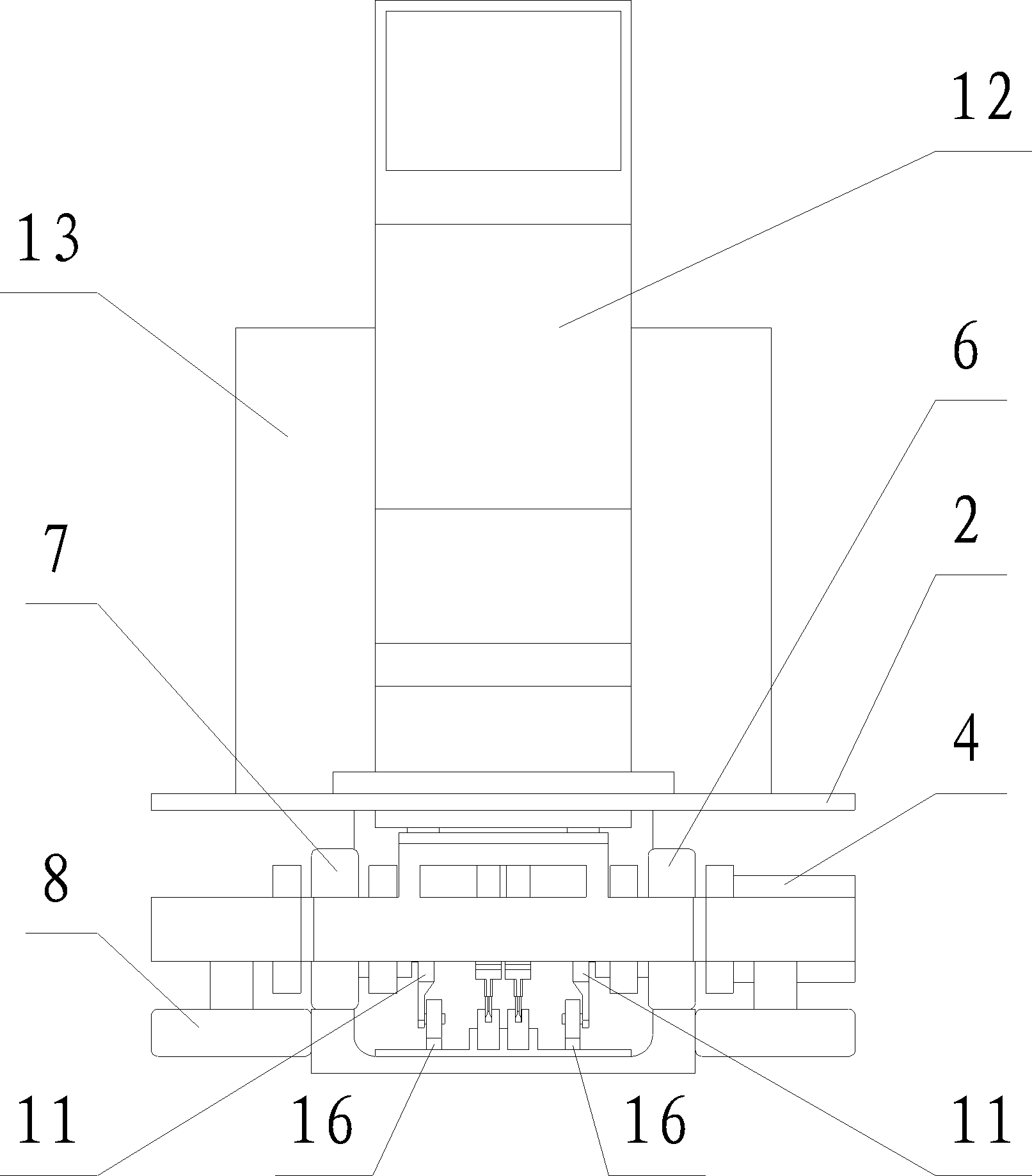
[0022] Such as Figure 1~4 As shown, the present invention includes a chassis 2, a collector 10, a travel switch 11, a cloud platform 12, a control system 13, a slide wire 14, a positioning block 16 and two bogies 1, and the two bogies 1 are independent of each other and have the same structure. run on track 3 respectively. The section of the track 3 is "concave" shape, in the middle of the "concave" track, along the length direction of the track, a slide wire 14 is fixed through the slide wire fixing frame 15, and the slide wire 14 is composed of a copper core and an insulating sheath. The wire 14 is connected to an external power supply, and the sliding wire 14 is powered by the external power supply; on both sides of the sliding wire 14, multiple sets of positioning blocks 16 are symmetrically arranged.
[0023] Such as Figure 5 As shown, the bogie 1 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More