

Dynamic elbow joint prosthesis and dynamic upper limb prosthesis
An elbow joint and prosthesis technology, applied in the field of bionic structure design, to achieve the effect of maintaining stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
[0021] The standard dynamic dummy replaces the pilot for the ejection experiment, so from the perspective of simulating the pilot, it needs to meet the requirements of limb kinematics parameters and geometric parameters. And considering the mechanical environment of the ejection experiment, the dummy structure is required to meet certain load conditions. Therefore, the structure design of the upper limb of the dummy needs to realize three functions: (1) the degree of freedom and range of motion of the limb; (2) the geometric size; (3) the strength check.
[0022] In order to realize above-mentioned function, the technical scheme that the present invention adopts is:
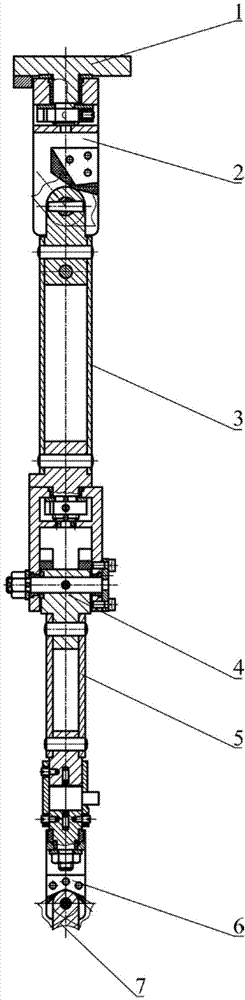
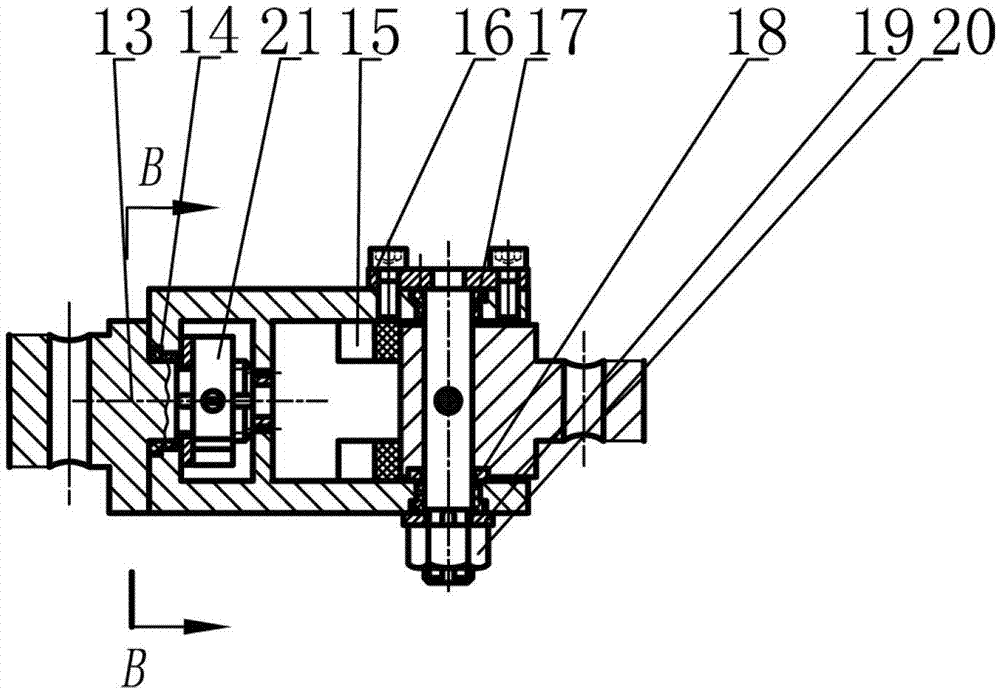
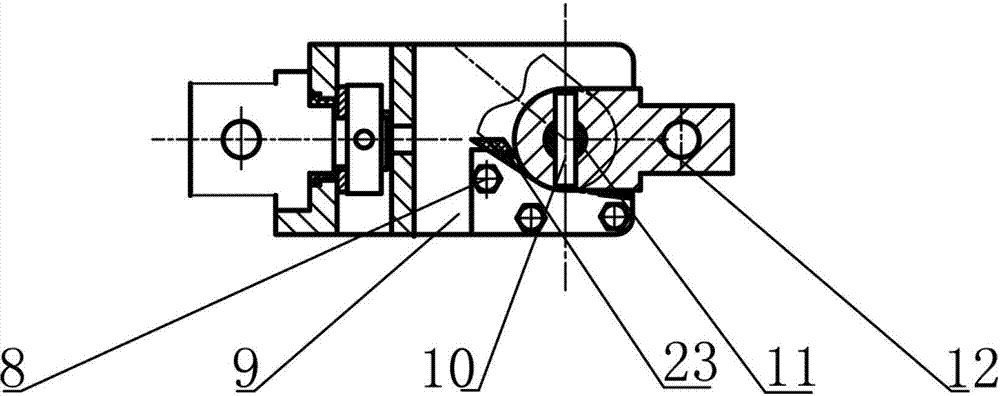
[0023] Such as figure 1 As shown, the present invention is a dummy upper limb, which can also be used for car safety collision dummy and other robots. The overall structure of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More