

Robot calibration method capable of achieving automatic trajectory correction
A calibration method and robot technology, applied in the field of trajectory correction, can solve the problems such as the difficulty of effectively guaranteeing the accuracy of manual correction, the inability of the robot to accurately complete the loading and unloading, and the time-consuming manual correction of the trajectory, so as to save labor costs, Highlight substantive features and correct precise effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
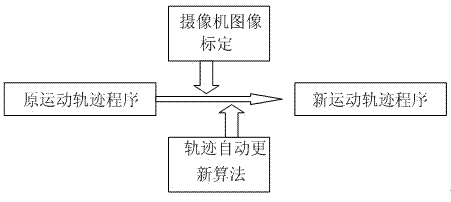
[0021] When the robot fixture is working with other processing equipment, in order to ensure the accuracy of the robot fixture's feeding and feeding, its motion trajectory is generally controlled by a preset motion trajectory program. However, in the processing operation, if the processing equipment or processing parts are shifted, if the robot fixture still runs according to the original trajectory, the robot will not be able to accurately complete the work of loading and unloading. At this time, the trajectory of the robot needs to be recalibration. Generally, the traditional correction method is to manually correct the trajectory, which is not only time-consuming and labor-intensive, but also difficult to guarantee the accuracy of the correction. Therefore, on the basis of existing equipment, the present invention uses camera calibration as a benchmark and cooperates with relevant computer programs to realize automatic correction of the robot's motion trajectory.
[0022] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More