

Flight path synthetic method in unmanned aerial vehicle visual navigation
A synthesis method and visual navigation technology, applied in the field of visual navigation, can solve problems such as difficult to meet real-time performance and large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
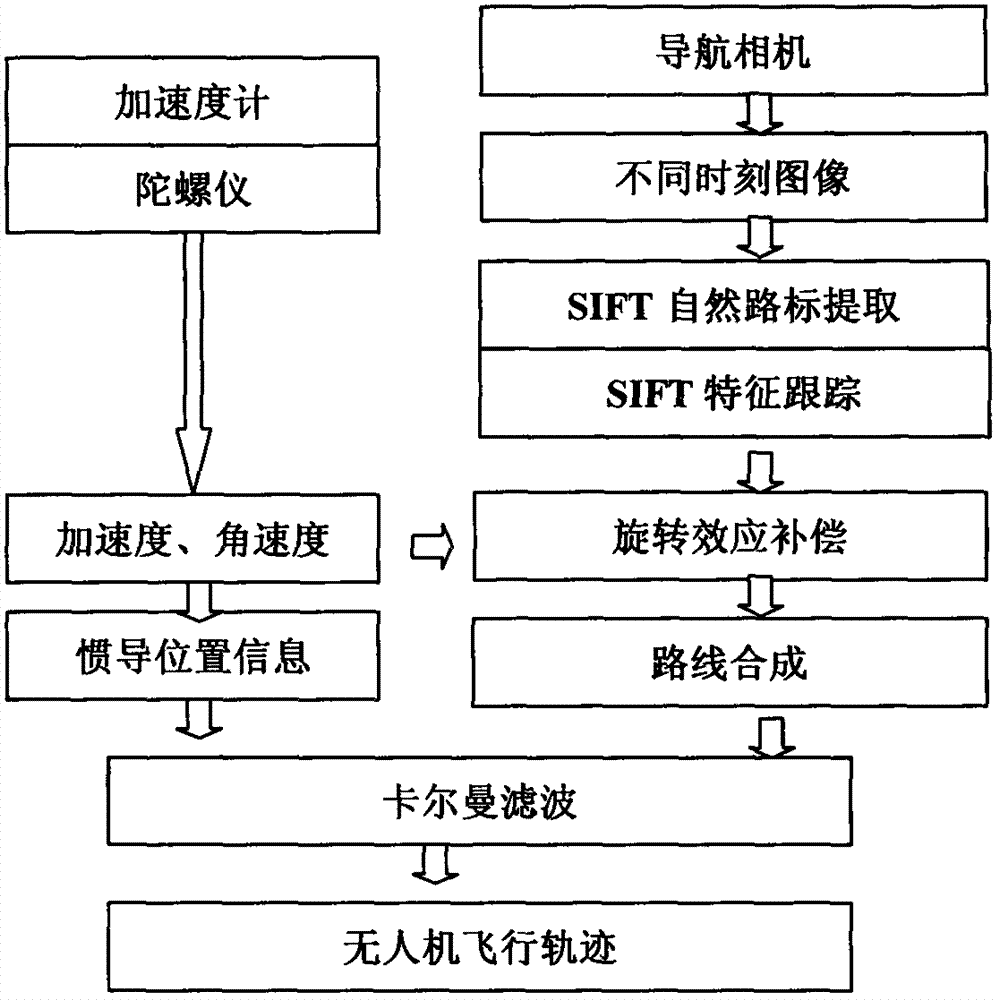
[0012] The specific design ideas of the main links are as follows:
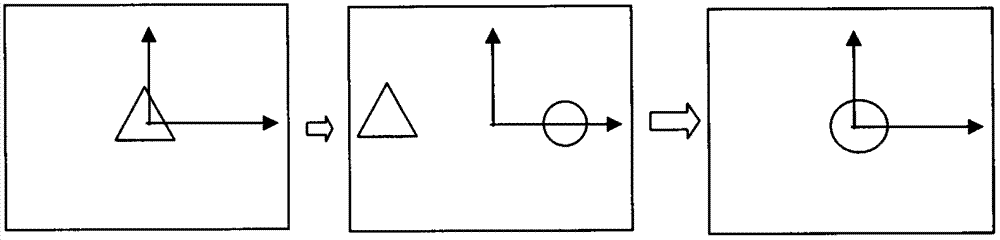
[0013] (1) UAV rotation effect compensation
[0014] The rotation effect of the drone has an impact on the displacement of the feature points in the image. Therefore, after the feature point position information, the influence of the rotation effect should be removed. Euler angles (θ, φ) and angular velocity (ω x , ω y , ω z ), based on formula (1) and formula (2).
[0015] x i t = x i - ( f tan θ ) y i t = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More