Uncalibrated visual servoing using real-time velocity optimization
A technology of visual servoing and digital video, applied in the field of visual servoing, to achieve the effect of eliminating necessity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
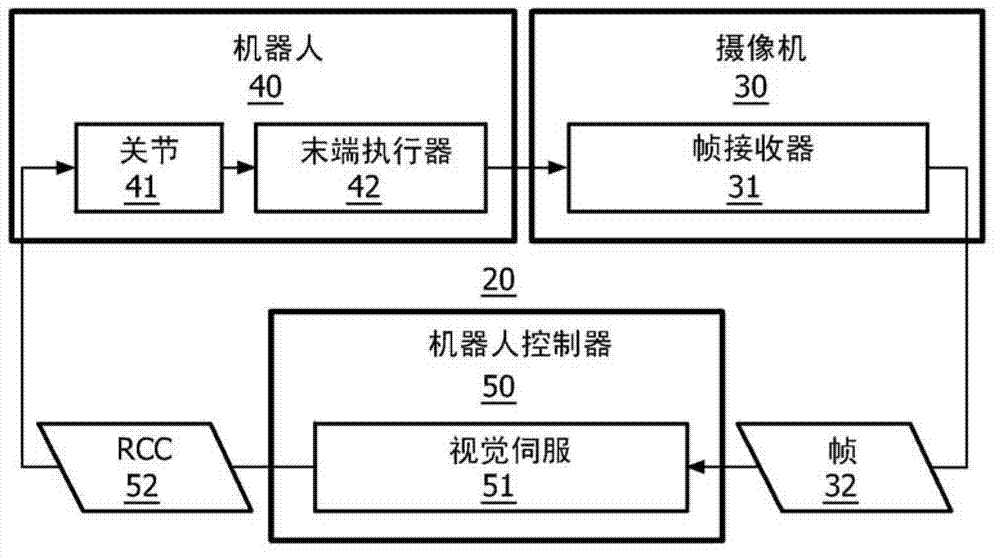
[0024] like figure 1 As shown, the robotic system 20 employs the camera 30 , the robot 40 and the robot controller 50 to implement any robotic process involving the autonomous movement capabilities of the robot 40 . Examples of such robotic processes include, but are not limited to, medical procedures, assembly line processes, and processes involving mobile robots. Specifically, medical procedures to which the robotic system 20 can be applied include, but are not limited to, minimally invasive cardiac surgery (eg, coronary artery bypass grafting or mitral valve replacement), minimally invasive abdominal surgery (laparoscopy) (eg, prostatectomy or cholecystectomy) and endoscopic surgery that traverses the lumen through a natural orifice.
[0025] Camera 30 may be any type of camera with a forward-facing optical viewfinder or a tilting optical viewfinder, and it employs any type of frame grabber 31 capable of recording at a predetermined frame rate (e.g., 30 frames per second) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More