

Method for controlling servo system of active disturbance rejection control technology
A technology of active disturbance rejection control and servo system, which is applied in the field of servo system control and can solve problems such as deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
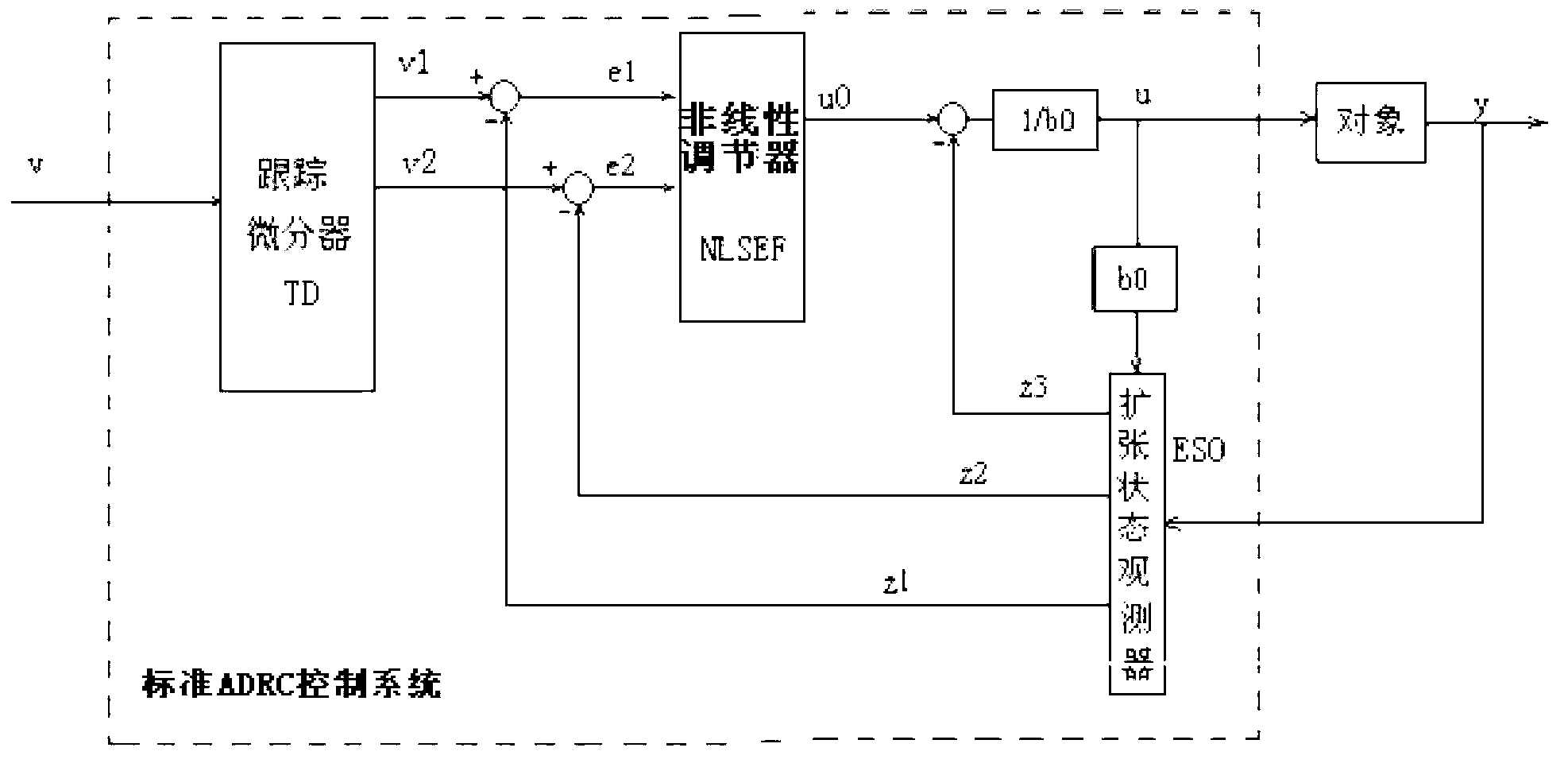
[0072] The invention is an improvement on the application of the ADRC technology to the servo system, making the algorithm more suitable for the servo system.
[0073] For a servo system that uses ADRC technology, first determine the gain b0 of the controlled object and the maximum acceleration r that can be used. The controlled object here should include the components with inherent characteristics in all systems except the regulator, such as the common digital pulse width modulation (PWM) power amplifier driven DC torque motor angle control system, b0 will include the digital PWM output voltage Gain, the torque gain of the motor, the total moment of inertia of the motor and the load, the angle measurement gain, and if there is a reduction gear, the reduction ratio should also be considered. In short, b0 is the total gain of the controlled object. When the input of the controlled object is an integer digital code and the output is also an integer digital code, the meaning of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More