

A robot adaptive impedance control system based on dynamic model
A dynamic model and impedance control technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problem of low control precision, achieve the effect of improving control precision, reducing position error and speed error, and reducing following error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
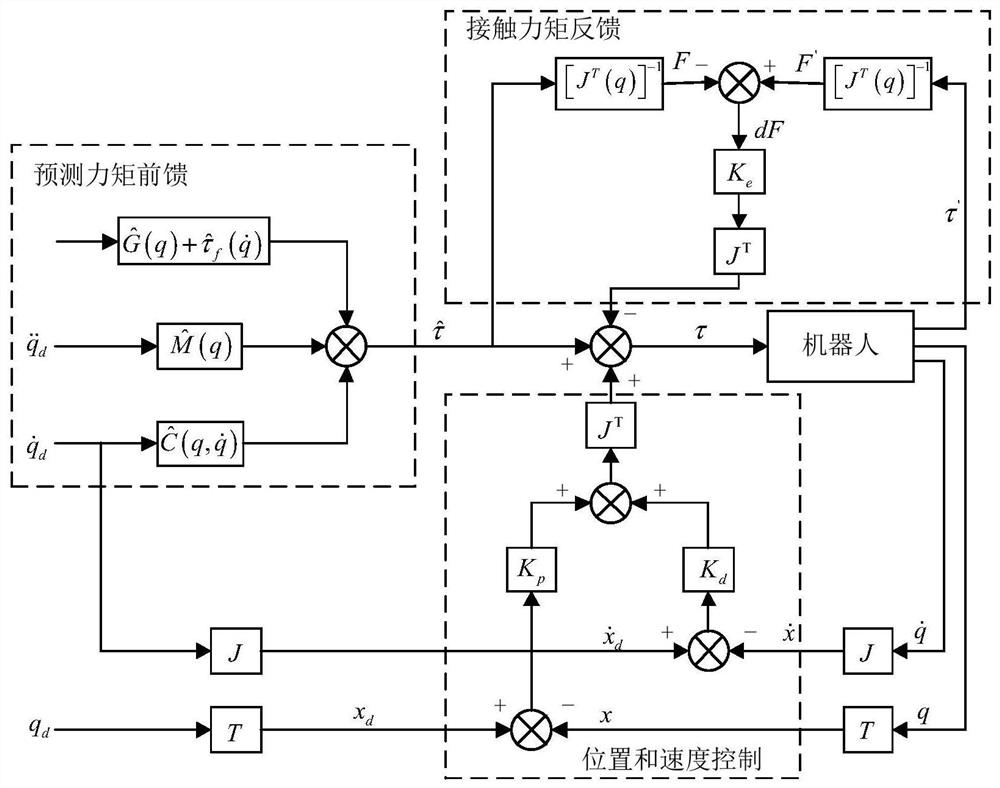
[0081] In this embodiment, the Huazhong CNC 605 robot is taken as an example to further illustrate the present invention, wherein the number of joints of the Huazhong CNC 605 robot is n=6. Specifically, the preprocessing module established the dynamic model of the Huazhong CNC 605 robot based on the Newton-Eulerian method in consideration of joint Coulomb friction and viscous resistance, and the theoretical joint calculated based on the dynamic model The torque is: In the formula, q, Respectively represent the robot joint angle, angular velocity and angular acceleration; Indicates the moment of inertia predicted by the dynamic model; Indicates the centrifugal force and Coriolis moment predicted by the dynamic model; represents the gravitational moment calculated by the dynamic model, Indicates the viscous friction force and Coulomb friction force predicted by the kinetic model, d is the viscous friction coefficient; μ is the Coulomb friction coefficient.
[0082] Fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More