

A Lane Keeping Method Based on Machine Learning
A technology of lane keeping and machine learning, applied in the field of lane keeping based on machine learning, it can solve the problem of inability to realize the personalized design of the car owner, and achieve the effect of better accuracy and reducing the following error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
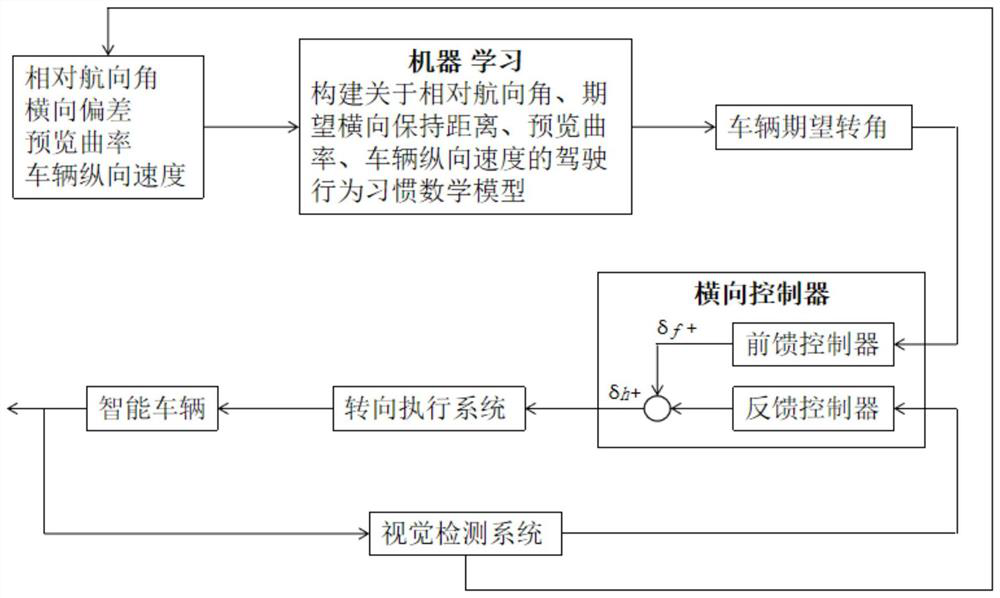
[0039] refer to figure 1 , image 3 As shown, a machine learning-based lane keeping method in this embodiment provides a visual detection system, a steering execution system, and a lateral controller. The controller includes a feedforward controller and a feedback controller.
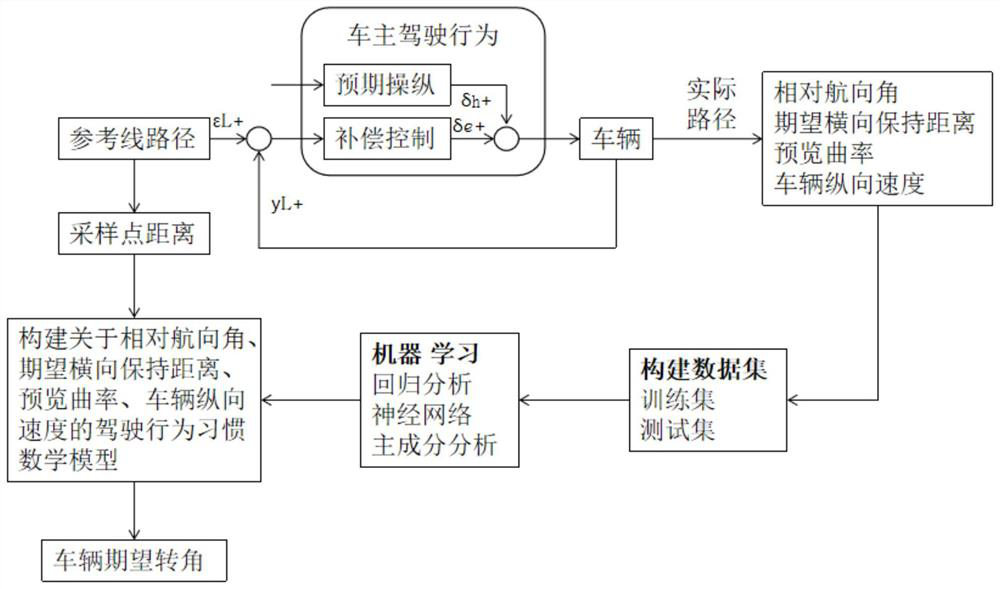
[0040] The lane keeping method includes a model building step and an automatic lateral control step. refer to image 3 , Figure 4 As shown, the model building steps include:
[0041] S10, the visual inspection system collects driving data of the car owner to construct a driving behavior habit database when the car owner is driving the vehicle, and the car owner's driving data is data representing the driving behavior and driving habits of the car owner driving the vehicle.
[0042] S20, the lateral controller constructs a mathematical model of driving behavior ha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More